This package provides a function template to compute a triangular mesh approximating a surface.
The meshing algorithm requires to know the surface to be meshed only through an oracle able to tell whether a given segment, line or ray intersects the surface or not and to compute an intersection point if any. This feature makes the package generic enough to be applied in a wide variety of situations. For instance, it can be used to mesh implicit surfaces described as the zero level set of some function. It may also be used in the field of medical imaging to mesh surfaces described as a gray level set in a three dimensional image.
The meshing algorithm is based on the notion of the restricted Delaunay triangulation. Basically the algorithm computes a set of sample points on the surface, and extract an interpolating surface mesh from the three dimensional triangulation of these sample points. Points are iteratively added to the sample, as in a Delaunay refinement process, until some size and shape criteria on mesh elements are satisfied.
The size and shape criteria guide the behaviour of the refinement process and control its termination. They also condition the size and shape of the elements in the final mesh. Naturally, those criteria can be customized to satisfy the user needs. The Surface mesher package offers a set of standard criteria that can be scaled through three numerical values. Also the user can also plug in its own set of refinement criteria.
There is no restriction on the topology and number of components of the surface provided that the oracle (or the user) is able to provide one initial sample point on each connected component. If the surface is smooth enough, and if the size criteria are small enough, the algorithm guarantees that the output mesh is homeomorphic to the surface, and is within a small bounded distance (Hausdorff or even Frechet distance) from the surface. The algorithm can also be used for non smooth surfaces but then there is no guarantee.
The meshing process is launched through a call to a function template. There are two overloaded versions of the meshing function whose signatures are the following:
|
| ||||
|
|
| |||
|
| ||||
|
|
| |||
The template parameter SurfaceMeshC2T3 stands for a data structure type that is used to store the surface mesh. This type is required to be a model of the concept SurfaceMeshComplex_2InTriangulation_3. Such a data structure has a pointer to a three dimensional triangulation and encodes the surface mesh as a subset of facets in this triangulation. An argument of type SurfaceMeshC2T3 is passed by reference to the meshing function. This argument holds the output mesh at the end of the process.
The template parameter Surface stands for the surface type. This type has to be a model of the concept Surface_3.
The knowledge on the surface, required by the surface mesher is encapsulated in a traits class. Actually, the mesher accesses the surface to be meshed through this traits class only. The traits class is required to be a model of the concept SurfaceMeshTraits_3. The difference between the two overloaded versions of make_surface_mesh can be explained as follows
The first overloaded version can be used whenever the surface type either provides a nested type Surface::Surface_mesher_traits_3 that is a model of SurfaceMeshTraits_3 or is a surface type for which a specialization of the traits generator Surface_mesh_traits_generator_3<Surface> is provided. Currently, the library provides partial specializations of Surface_mesher_traits_generator_3<Surface> for implicit surfaces (Implicit_surface_3<Traits, Function> ) and grey level images (Gray_level_image_3<FT, Point> ).
The parameter criteria handles the description of the size and shape criteria driving the meshing process. The template parameter Criteria has to be instantiated by a model of the concept MeshCriteria.
The parameter Tag is a tag whose type influences the behavior of the meshing algorithm. For instance, this parameter can be used to enforce the manifold property of the output mesh while avoiding an over-refinement of the mesh. Further details on this subject are given in Section 30.4.
A call to make_surface_mesh(c2t3,surface, criteria, tag) launches the meshing process with an initial set of points which is the union of two subsets: the set of vertices in the initial triangulation pointed to by c2t3, and a set of points provided by the Compute_initial_points() functor of the traits class. This initial set of points is required to include at least one point on each connected component of the surface to be meshed.
The default meshing criteria are determined by three numerical values:
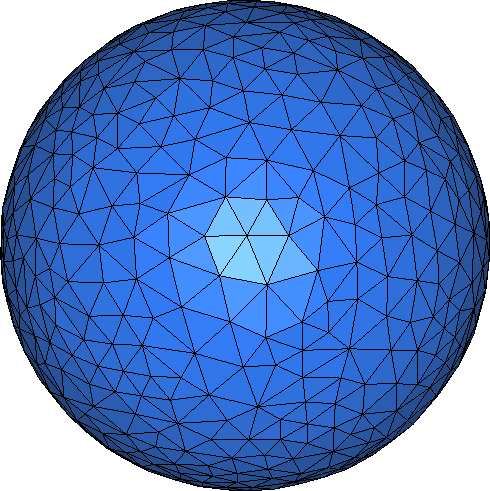
Given this surface type, the surface mesher will use an automatically generated traits class.
The resulting mesh is shown on figure 30.3.1.
// file examples/Surface_mesher/implicit_surface_mesher.C
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/make_surface_mesh.h>
#include <CGAL/Implicit_surface_3.h>
struct Kernel : public CGAL::Exact_predicates_inexact_constructions_kernel {};
typedef CGAL::Surface_mesh_vertex_base_3<Kernel> Vb;
typedef CGAL::Surface_mesh_cell_base_3<Kernel> Cb;
typedef CGAL::Triangulation_data_structure_3<Vb, Cb> Tds;
typedef CGAL::Delaunay_triangulation_3<Kernel, Tds> Tr;
typedef CGAL::Surface_mesh_complex_2_in_triangulation_3<Tr> C2t3;
typedef Kernel::Sphere_3 Sphere_3;
typedef Kernel::Point_3 Point_3;
typedef Kernel::FT FT;
typedef FT (*Function)(Point_3);
typedef CGAL::Implicit_surface_3<Kernel, Function> Surface_3;
FT sphere_function (Point_3 p) {
const FT x2=p.x()*p.x(), y2=p.y()*p.y(), z2=p.z()*p.z();
return x2+y2+z2-1;
}
int main(int, char **) {
Tr tr; // 3D-Delaunay triangulation
C2t3 c2t3 (tr); // 2D-complex in 3D-Delaunay triangulation
// defining the surface
Surface_3 surface(sphere_function, // pointer to function
Sphere_3(CGAL::ORIGIN, 2.)); // bounding sphere
// defining meshing criteria
CGAL::Surface_mesh_default_criteria_3<Tr> criteria(30., // angular bound
0.1, // radius bound
0.1); // distance bound
// meshing surface
make_surface_mesh(c2t3, surface, criteria, CGAL::Non_manifold_tag());
std::cout << "Final number of points: " << tr.number_of_vertices() << "\n";
}
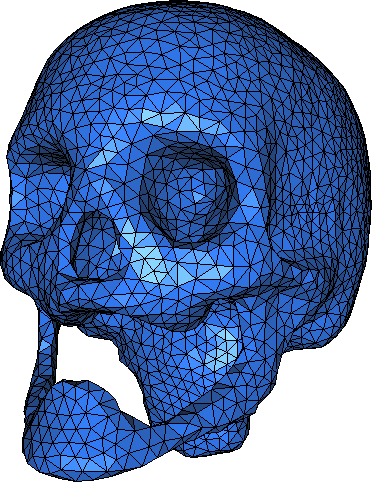
The main difference with the previous code is that the function used to define the surface is an object of type CGAL::Gray_level_image_3 created from an image file and a numerical value that is the gray value of the level one wishes to mesh.
Note that surface, which is still an object of type Implicit_surface_3 is now, defined by three parameters that are the function, the bounding sphere and a numerical value called the precision. This precision, whose value is relative to the bounding sphere radius, is used in the intersection computation. This parameter has a default which was used in the previous example. Also note that the center of the bounding sphere is required to be internal a point where the function has a negative value.
The chosen iso-value of this 3D image corresponds to a head skull. The resulting mesh is the introducing picture of this chapter.
// file examples/Surface_mesher/3d_image_surface_mesher.C
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/make_surface_mesh.h>
#include <CGAL/Gray_level_image_3.h>
#include <CGAL/Implicit_surface_3.h>
struct Kernel : public CGAL::Exact_predicates_inexact_constructions_kernel {};
typedef CGAL::Surface_mesh_vertex_base_3<Kernel> Vb;
typedef CGAL::Surface_mesh_cell_base_3<Kernel> Cb;
typedef CGAL::Triangulation_data_structure_3<Vb, Cb> Tds;
typedef CGAL::Delaunay_triangulation_3<Kernel, Tds> Tr;
typedef CGAL::Surface_mesh_complex_2_in_triangulation_3<Tr> C2t3;
typedef CGAL::Gray_level_image_3<Kernel::FT, Kernel::Point_3> Gray_level_image;
typedef CGAL::Implicit_surface_3<Kernel, Gray_level_image> Surface_3;
int main(int, char **) {
Tr tr; // 3D-Delaunay triangulation
C2t3 c2t3 (tr); // 2D-complex in 3D-Delaunay triangulation
// the 'function' is a 3D gray level image
Gray_level_image image("ImageIO/data/skull_2.9.inr.gz", 2.9);
// Carefully choosen bounding sphere: the center must be inside the
// surface defined by 'image' and the radius must be high enough so that
// the sphere actually bounds the whole image.
Kernel::Point_3 bounding_sphere_center(122., 102., 117.);
Kernel::FT bounding_sphere_squared_radius = 200.*200.*2.;
Kernel::Sphere_3 bounding_sphere(bounding_sphere_center,
bounding_sphere_squared_radius);
// definition of the surface, with 10^-2 as relative precision
Surface_3 surface(image, bounding_sphere, 1e-2);
// defining meshing criteria
CGAL::Surface_mesh_default_criteria_3<Tr> criteria(30.,
5.,
5.);
// meshing surface, with the "manifold without boundary" algorithm
make_surface_mesh(c2t3, surface, criteria, CGAL::Manifold_tag());
std::cout << "Final number of points: " << tr.number_of_vertices() << "\n";
}
The guarantees on the output mesh depend on the mesh criteria. Theoretical guarantees are given in [BO05]. First, the meshing algorithm is proved to terminate if the angular bound is not smaller than degrees. Furthermore, the output mesh is guaranteed to be homeomorphic to the surface, and there is a guaranteed bound on the distance (Hausdorff and even Frechet distance) between the mesh and the surface if the radius bound is everywhere smaller than the times the local feature size. Here is a constant that has to be less than 0.16, and the local feature size is defined on each point of the surface as the distance from to the medial axis. Note that the radius bound need not be uniform, although it is a uniform bound in the default criteria.
Naturally, such a theoretical guarantee can be only achieved for smooth surfaces that have a finite, non zero reach value. (The reach of a surface is the minimum value of local feature size on this surface).
The value of the local feature size on any point of the surface
or its minimum on the surface it usually unknown
although it can sometimes be guessed. Also it happens frequently
that setting the meshing criteria so as to fulfill the theoretical
conditions yields an over refined mesh.
On the other hand, when the size criteria are relaxed,
no homeomorphism with the input surface is guaranteed,
and the output mesh is not even guaranteed to be manifold.
To remedy this problem and give a more flexible
meshing algorithm, the function template
make_surface_mesh has a tag template parameter
allowing to slightly change the behavior of the refinement process.
This feature allows, for instance, to run the meshing
algorithm with a relaxed size criteria, more coherent
with the size of the mesh expected by the user,
and still have a guarantee that
the output mesh forms a manifold surface.
The function make_surface_mesh has specialized versions
for the following tag types:
Manifold_tag: the output mesh is guaranteed to be a manifold
surface without boundary.
Manifold_with_boundary_tag: the output mesh is guaranteed to be
manifold but may have boundaries.
Non_manifold_tag: the algorithm relies on the given criteria and
guarantees nothing else.
The algorithm implemented in this package is mainly based on the work of Boissonnat and Oudot [BO05]
The meshing algorithm is implemented using the design of mesher levels described in [RY06].
David Rey, Steve Oudot and Andreas Fabri have participated in the development of this package.