

|
CGAL 4.10.2-I-209 - Generalized Maps
|
|
CGAL 4.10.2-I-209 - Generalized Maps
|
A d-dimensional generalized map is a data structure representing an orientable or non-orientable subdivided d-dimensional object obtained by taking dD cells, and allowing to glue dD cells along (d-1)D cells. It provides a description of all the cells of the subdivision (for example vertices and edges), together with incidence and adjacency relationships.
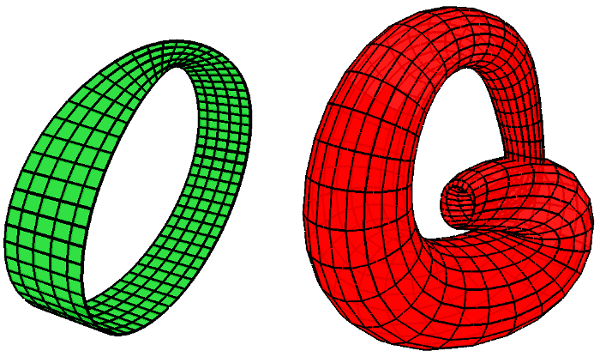
This package is a generalization of the combinatorial maps data structure (which allows to describe only orientable objects) in order to be able to describe also non-orientable objects such as a Möbius strip (Figure 28.1 Left) or a Klein bottle (Figure 28.1 Right).
We denote i-cell for an i-dimensional cell (for example in 3D, 0-cells are vertices, 1-cells are edges, 2-cells are facets, and 3-cells are volumes). A boundary relation is defined on these cells, giving for each i-cell c the set of (i-1)-cells contained in the boundary of c. Two cells c1 and c2 are incident if there is a path of cells, starting from the cell of highest dimension to the other cell, such that each cell of the path (except the first one) belongs to the boundary of the previous cell in the path. Two i-cells c3 and c4 are adjacent if there is an (i-1)-cell incident to both c3 and c4. You can see an example of a 2D object and a 3D object in Figure 28.2 showing some cells of the subdivision and some adjacency and incidence relations.

A generalized map is an edge-centered data structure, describing the cells and the incidence and adjacency relations. It uses only one basic element called dart, and a set of pointers between these darts. A dart can be thought as a part of an edge (1-cell), together with a part of incident cells of dimensions 0, 2, 3, ..., d. When a dart d0 describes a part of an i-cell c, we say that d0 belongs to c, and that c contains d0. Let us look at the example in Figure 28.3 showing the 2D and 3D generalized maps describing the two objects of Figure 28.2.

First let us start in 2D (Figure 28.3 (Left)). Edge e1 contains four darts. These darts are linked together with pointers called \( \alpha_0\) and \( \alpha_2\). Starting from a dart and following an \( \alpha_0\) pointer, we get to a dart which belongs to the same edge, to the same facet but to the other vertex (0-cell, which explains the index 0 of \( \alpha_0\)). Starting from a dart and following an \( \alpha_2\) pointer, we get to a dart which belongs to the same vertex, to the same edge but to the other facet (2-cell, which explains the index 2).
Facet f1 is represented by four edges, and thus contains eight darts. The edges are linked together with pointers called \( \alpha_0\) and \( \alpha_1\). Starting from a dart and following an \( \alpha_1\) pointer, we get to a dart which belongs to the same vertex, the same facet but to the other edge (1-cell, which explains the index 1 of \( \alpha_1\)).
Similarly, vertex v1 contains six darts, linked together with pointers \( \alpha_1\) and \( \alpha_2\).
The main interest of generalized map definition based on darts and \( \alpha_i\) pointers is to be able to increase the dimension only by adding new pointers. This is illustrated thanks to the 3D example given in Figure 28.3 (Right). In addition to \( \alpha_0\), \( \alpha_1\) and \( \alpha_2\) of the 2D case, there is a new pointer \( \alpha_3\).
If we take a closer look at the central edge e4 shown in Figure 28.4 (Left), we can see that it contains twelve darts linked together. Starting from a dart and following an \( \alpha_3\) pointer, we get to a dart which belongs to the same vertex, to the same edge, to the same facet, but to the neighboring volume (a 3-cell, which explains the index 3 in \( \alpha_3\)). Similarly, starting from a dart and following an \( \alpha_2\) pointer, we get to a dart which belongs to the same vertex, to the same edge, to the same volume, but to the neighboring facet (2-cell). And starting from a dart and following an \( \alpha_0\) pointer, we get to a dart which belongs to the same edge, to the same facet, to the same volume, but to the neighboring vertex (0-cell). Starting from any of these twelve darts and following \( \alpha_0\), \( \alpha_2\) and \( \alpha_3\) pointers, we can reach exactly the twelve darts that belong to edge e4.

For facets, by following an \( \alpha_1\) pointer, we get to a dart which belongs to the same vertex, to the same facet, to the same volume, but to the next edge (1-cell, which explains the index 1 of \( \alpha_1\)). Starting from any dart and following \( \alpha_0\), \( \alpha_1\) and \( \alpha_3\) pointers, we can reach exactly all the darts belonging to the facet (see Figure 28.4 (Right)). For volumes, starting from any dart and following \( \alpha_0\), \( \alpha_1\) and \( \alpha_2\) pointers, we can reach exactly all the darts belonging to the volume. For vertices, we have to follow \( \alpha_1\), \( \alpha_2\) and \( \alpha_3\) pointers to reach exactly the darts belonging to the vertex v.
In some cases, the general rule that by following an \( \alpha_i\) we get a dart which belongs to the neighboring i-cell is not true, as for example for darts belonging to the boundary of the represented object. For example, in Figure 28.2 (Left), any dart d0 that does not belong to edge e1, e2 and e3 belongs to a 2-cell, and there is no neighboring facet along the edge containing d0. Another example is in Figure 28.2 (Right), for any dart d0 that belongs to facet f5. d0 belongs to volume vol2, but there is no neighboring volume along this facet. The general rule is also not true for unbounded cells. For example if we remove a dart in Figure 28.3 (Left), we obtain an unbounded facet having one dart without next dart for \( \alpha_0\), and one dart without next dart for \( \alpha_1\), and if we remove a facet in Figure 28.3 (Right), we obtain an unbounded volume having some darts without neighboring facet for \( \alpha_2\). In such a case, the darts are linked with themselves for \( \alpha_i\) to describe that a dart d0 is not linked to another dart in dimension i.
Generalized maps are defined in any dimension. A -1D generalized map is a set of isolated darts describing isolated vertices. A 0D generalized map is a set of darts paired by \( \alpha_0\) describing isolated edges. A 1D generalized map describes paths or cycles of darts corresponding to paths or cycles of edges. The most useful cases are 2D and 3D generalized maps. In 2D, a generalized map is a set of surfaces (orientable or not), and in 3D a generalized map is a set of connected volumes. In the following, notions are mainly illustrated in 3D. But it is important to keep in mind that one main interest of generalized maps is their generic definition in any dimension, and that everything presented in this manual is valid in any dimension.
A dD generalized map is useful when you want to describe dD objects and the adjacency relations between these objects, and you want to be able to efficiency traverse these objects by using the different relations. For example, we can use a 3D generalized map to describe a 3D segmented image: each 3-cell corresponds to a region in the image and each 2-cell corresponds to a contact area between two regions.
A generalized map does not contain any geometric information. However, this package allows to associate any information to the cells of the generalized map. A specific information, which is often used in practice, consists in adding linear geometry to a generalized map by associating a point to each vertex of the map: this is the object of the Linear cell complex package (when an object has a point associated to each vertex, each edge is thus a straight line segment, which explains the name linear geometry). The Linear cell complex package can for example be useful to describe 3D buildings as set of walls, rooms, doors and windows (both combinatorial and geometric descriptions) and all the adjacency relations between these elements allowing for example to move a camera in a given building from rooms to rooms by traversing doors.
In this section, we describe dD generalized maps in terms of data structure and operations. Mathematical definitions are provided in Section Mathematical Definitions, and a package description is given in Section Software Design.
A dD generalized map is a set of darts D. A dart d0 is an element that can be linked with d+1 darts by pointers called \( \alpha_i\), with 0 \( \leq \) i \( \leq \) d. Dart d0 is said i-free when \( \alpha_i\)(d0)=d0. Each \( \alpha_i\) is its own inverse, i.e. \( \alpha_i\)( \( \alpha_i\)(d0))=d0.
A generalized map is without i-boundary if there is no i-free dart, and it is without boundary if it is without i-boundary for all dimensions 1 \( \leq \) i \( \leq \) d.
We show in Figure 28.5 a 3D object and the corresponding 3D generalized map. This map has 80 darts, some darts being numbered. In this generalized map, we have for example \( \alpha_0\)(1)=2, \( \alpha_1\)(1)=8, \( \alpha_2\)(1)=24, and \( \alpha_3\)(1)=9. This generalized map is without 0-boundary, without 1-boundary and 2-boundary, but has some 3-boundary, because some darts are 3-free, for example \( \alpha_3\)(17)=17.

A cell in a dD generalized map is implicitly represented by a subset of darts. In this section, we will see how to retrieve all cells containing a given dart, how to retrieve all darts belonging to a cell containing a given dart, and how incidence and adjacency relations are defined in terms of darts.
The first important property of a generalized map is that each dart belongs to an i-cell, \( \forall \) i, 0 \( \leq \) i \( \leq \) d. For example in 3D, a dart belongs to a vertex, an edge, a facet, and a volume. This means that a 3D generalized map containing an isolated dart contains exactly one vertex, one edge, one facet and one volume.
The second important property is that cells of a generalized map correspond to specific orbits. Given a set S \( \subseteq\){ \( \alpha_1\),..., \( \alpha_d\)} and a dart d0, the orbit \( \langle{}\) S \( \rangle{}\)(d0) is the set of darts that can be reached from d0 by following any combination of any \( \alpha_i\)'s in S (to simplify notations, we can use for example \( \langle{}\) \( \alpha_1\), \( \alpha_4\) \(\rangle{}\)(d0) to denote \( \langle{}\) S \( \rangle{}\)(d0) with S={ \( \alpha_1\), \( \alpha_4\)}).
Given a dart d0, in general, \( \alpha_i\)(d0) (with 0 \( \leq \) i \( \leq \) d) belongs to the same cells as d0, only the i-cell is different. There are two exceptions:
Since \( \alpha_i\)(d0) (with 0 \( \leq \) i \( \leq \) d) allows to change the current i-cell, all the darts that can be reached from d0 by using any combination of \( \alpha_j\)'s, \( \forall \) j, 0 \( \leq \) j \( \leq \) d and j \( \neq \) i are contained in the same i-cell as d0. The i-cell containing d0 is defined in terms of orbit by \( \langle{}\) \( \alpha_0\),..., \( \alpha_{i-1}\), \( \alpha_{i+1}\),..., \( \alpha_d\) \( \rangle{}\)(d0).
Orbit \( \langle{}\) \( \alpha_0\),..., \( \alpha_d\) \( \rangle{}\)(d0) is the connected component containing dart d0. A generalized map is connected if this set is equal to the set of all the darts of the generalized map.
A last important property of cells is that for all dimensions i the set of i-cells forms a partition of the set of darts D, i.e. for any i, the union of the sets of darts of all the i-cells is equal to D, and the sets of darts of two different i-cells are disjoint.
Let us give some examples of cells in 3D, for the 3D generalized map of Figure 28.5 :
Using this definition of cells as sets of darts, we can retrieve all the incidence and adjacency relations between the cells of the subdivision in a generalized map. Two cells are incident if the intersection of their two sets of darts is non empty (whatever the dimension of the two cells). Two i-cells c1 and c2, 1 \( \leq \) i \( \leq \) d, are adjacent if there is d1 \( \in \) c1 and d2 \( \in \) c2 such that d1 and d2 belong to the same (i-1)-cell.
In the example of Figure 28.5, vertex v and edge e are incident since the intersection of the two corresponding sets of darts is {1,9,24,25} \( \neq \) \( \emptyset\). Vertex v is incident to facet f2 since the intersection of the two corresponding sets of darts is {1,8,9,16} \( \neq \) \( \emptyset\). Edge e and facet f1 are incident since the intersection of the two corresponding sets of darts is {23,24} \( \neq \) \( \emptyset\). Finally, facets f1 and f2 are adjacent because 1 \( \in \) f1, 24 \( \in \) f2 and 1 and 24 belong to the same edge.
We can consider i-cells in a dimension d' with i \( \leq \) d' \( \leq \) d. The idea is to consider the i-cells as if the generalized map was in d' dimension. For that, we only take into account the \( \alpha_j \)s for j \( \leq \) d'. The i-cell containing d0 in dimension d' is the orbit \( \langle{}\) \( \alpha_0\),..., \( \alpha_{i-1}\), \( \alpha_{i+1}\),..., \( \alpha_{d'}\) \( \rangle{}\)(d0). By default, i-cells are considered in dimension d, the dimension of the generalized map.
In the example of Figure 28.5, the 2-cell containing dart 1 is facet f2 which is the set of darts {1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16}. If we consider the same 2-cell in dimension 2, we obtain the set of darts {1,2,3,4,5,6,7,8}. Intuitively we forget \( \alpha_3\) and we obtain the set of darts of the facet containing dart 1 restricted to the volume containing this dart.
Generalized maps only describe the cells of the subdvision, and all the incidence and adjacency relations between these cells. This is not enough for many applications which need to associate information to cells. This can be geometric or non-geometric information, such as 3D points associated to vertices, the edge length associated to edges, or a color or normal to a facet.
To answer this need, a generalized map allows to create attributes which are able to store any information, and to associate attributes to cells of the generalized map. We denote i-attributes for the attributes associated with i-cells. Attributes may exist for only some of the dimensions, and if they exist for dimension i, they do not necessarily exist for each of the i-cells. More precisely, i-attributes are associated to i-cells by an injection:
Since i-cells are not explicitely represented in generalized maps, the association between i-cells and i-attributes is transferred to darts: if attribute a is associated to i-cell c, all the darts belonging to c are associated to a.
We can see two examples of generalized maps having some attributes in Figure 28.6. In the first example (Left), a 2D generalized map has 1-attributes containing a float, for example corresponding to the length of the associated 1-cell, and 2-attributes containing a color in RGB format. In the second example (Right), a 3D generalized map has 2-attributes containing a color in RGB format.

There are some conditions that a generalized map must satisfy to be valid. Some of them have already been given about the \( \alpha\) pointers (see Section Generalized Map and Darts) and about the association between darts and attributes (see Section How to Associate Information to Cells).
There is an additional condition related to the type of represented objects, which are quasi-manifold dD objects. A dD quasi-manifold is an object obtained by taking some isolated d-cells, and allowing to glue d-cells along (d-1)-cells. In 2D, quasi-manifolds are manifolds, but this is no longer true in higher dimension as we can see in the example presented in Figure 28.7. In this example, the object to the right is not a manifold since the neighborhood of the point p in the object is not homeomorphic to a 3D ball (intuitively, two objects are homeomorphic if each object can be continuously deformed into the second one; in such a case, the two objects have exactly the same topological properties).

Generalized maps can only represent quasi-manifolds due to the definition of \( \alpha\) pointers. As we have seen in Section Cells as Sets of Darts, \( \alpha_i\)(d0) (with 0 \( \leq \) i \( \leq \) d) belongs to the same cells as d0, only the i-cell is different. In other words, \( \alpha_i\) links two i-cells that share a common (i-1)-cell: it is not possible to link more than two i-cells along a same (i-1)-cell. For this reason, it is not possible to describe non quasi-manifold objects as those shown in Figure 28.8 by generalized maps.

Due to this additional condition, any objects can not be represented by a generalized map but only quasi-manifolds. We need to study now the inverse relation. Does any set of darts linked together by \( \alpha_i\)'s, with 0 \( \leq \) i \( \leq \) d correspond to a quasi-manifold? As we can see in Figure 28.9, the answer is no.

In the first example (Left), there are two 3-cells (one to the left for the cube, a second to the right for the pyramid) which are partially adjacent along one 2-cell. Indeed, only four darts of the 2-cell are linked by \( \alpha_3\). We have \( \alpha_3\)(1)=a, \( \alpha_3\)(2)=b, \( \alpha_3\)(7)=g and \( \alpha_3\)(8)=h (and vice-versa). This configuration is not possible in a quasi-manifold: two d-cells are always glue along an entire (d-1)-cells.
But as we can see in the second example (Right), the condition that all the darts of the cell are linked in not sufficient. Indeed, in this example, all the darts of the 2-cell between the cube and the pyramid are linked together by \( \alpha_3\). However, this configuration does not correspond to a 3D quasi-manifold. Indeed, the operation of gluing two d-cells along one (d-1)-cell must preserve the structure of the initial (d-1)-cell.
To avoid these two kinds of configurations, conditions are added on \( \alpha\) pointers compositions (see Section Mathematical Definitions, condition (3) of the definition of generalized maps). Intuitively these conditions say that if two darts are linked by \( \alpha_i\), then all the required darts are linked by \( \alpha_i\) two by two in such a way that neighborhood relations are preserved.
We say that a generalized map is valid if it satisfies all the conditions on \( \alpha\) pointers and on association between darts and attributes. High level operations provided on generalized maps ensure that these conditions are always satisfied. Sometimes, it can be useful to use low level operations in a specific algorithm, for example to modify locally a generalized map in a really fast way. In such a case, additional operations may be needed to restore these validity conditions.
Generalized maps and combinatorial maps are very similar: they are both based on darts and functions, and they both allow to represent quasi-manifold nD objects. This explains that they share their main concepts.
However, they have three main differences. Firstly, generalized maps allow to represent orientable and non-orientable objects while combinatorial maps allow only to represent orientable objects. Secondly, generalized maps are homogeneous in each dimension since all functions are involutions, while combinatorial maps are not homogeneous since one function is a permutation while other ones are involutions. This homogeneity simplifies algorithms for generalized maps since it allows to avoid a specific case for the first dimension. Thirdly, a generalized map requires twice the number of darts of a combinatorial map in order to represent an orientable object.
Considering these different advantages and drawbacks, you can choose to use generalized maps or combinatorial maps depending on the needs of your application.
The diagram in Figure 28.10 shows the different classes of the package. Generalized_map is the main class (see Section Generalized Maps). It allows to manage darts and attributes (see Section Cell Attributes). Users can customize a generalized map thanks to an items class (see Section Generalized Map Items), which defines the information associated with darts and the attribute types. These types may be different for different dimensions, and they may also be void (note that the main concepts of GenericMap, GenericMapItems and CellAttribute are shared between combinatorial maps and generalized maps).
The darts and attributes are accessed through handles. A handle is a model of the Handle concept, thus supporting the two dereference operators operator* and operator->. All handles are model of LessThanComparable and Hashable, that is they can be used as keys in containers such as std::map and boost::unordered_map.

The class Generalized_map<d,Items,Alloc> is a model of the GeneralizedMap concept which refines the generic concept of GenericMap. It has three template parameters standing for the dimension of the generalized map (an unsigned int), an items class (a model of the GenericMapItems concept), and an allocator which must be a model of the allocator concept of the STL. Default classes are provided for the items and the allocator classes.
The main role of the class Generalized_map is the storage and the management of darts. It allows to create or remove an isolated dart from the generalized map. The Dart_handle type defines a handle to the type of used darts (given in the items class). Generalized_map provides several ranges which allow to iterate over specific subsets of darts of the generalized map (see Section Iterating over Orbits, Cells, and Attributes). It also defines several methods to link and to unlink darts by \( \alpha_i\)s (see Section Sewing Orbits and Linking Darts). We said that a dart d0 is i-free if \( \alpha_i\)(d0)=d0. Finally, some high level operations are defined to update the generalized map (see Section Removal and Insertion Operations)
The second role of the class Generalized_map is the storage and the management of attributes. It allows to create or remove an attribute, and provides methods to associate attributes and cells. A range is defined for each i-attribute allowing to iterate over all the i-attributes of the generalized map. Finally, Generalized_map defines several types allowing to manage the attributes. We can use Generalized_map::Attribute_handle<i>::type for a handle to the i-attributes (and the const version Generalized_map::Attribute_const_handle<i>::type) and Generalized_map::Attribute_type<i>::type for the type of the i-attributes.
All information associated to darts ( \( \alpha\) links and attributes) are accessed through member functions in GeneralizedMap.
The GenericMapItems concept defines information associated with darts and attribute types of a generalized map. It contains one inner class named Dart_wrapper, having one template parameter, Map, a model of GenericMap concept. The Dart_wrapper<Map> class can provide two local types: Dart_info for the information associated with darts, and Attributes which defines the attributes and their types.
If Dart_info is not defined or if it is equal to void, no information is associated with darts.
The Attributes tuple must contain at most d+1 types (one for each possible cell dimension of the generalized map). Each type of the tuple must be either a model of the CellAttribute concept or void. The first type corresponds to 0-attributes, the second to 1-attributes and so on. If the i th type in the tuple is void, (i-1)-attributes are disabled: we say that (i-1)-attributes are void. Otherwise, (i-1)-attributes are enabled and have the given type: we say (i-1)-attributes are non void. If the size of the tuple is k, with k \( < \) dimension +1, \( \forall \) i: k \( \leq \) i \( \leq \) dimension, i-attributes are void. If this type is not defined, all attributes are disabled.
The class Generic_map_min_items is a model of the GenericMapItems concept which can be used for default behaviors. It defines void as type of information associated with darts, and Attributes as empty tuple.
The class Cell_attribute<Map,Info_,Tag,OnMerge,OnSplit>, a model of the CellAttribute concept, represents an attribute associated with a cell of a generalized map. The template parameter Map must be a model of the GenericMap concept. The attribute stores a handle to one dart of its associated cell when the template parameter Tag is Tag_true. Info_ is the type of information stored in the attribute. It may be void. OnMerge and OnSplit must be either Null_functor, or models of the Binary Function concept having two references to a model of CellAttribute as type of both parameters and void as return type. There are two default parameters for OnMerge and OnSplit, which are Null_functor, a default parameter for Tag which is Tag_true, and a default parameter for Info_ which is void.
If Info_ is different from void, the class Cell_attribute contains two methods info() returning the information contained in the attribute (const and non const version). The information is returned by reference, thus the non const version allows the modification of the information.
Two attributes are merged when their corresponding cells are merged into one cell during some operation. In this case, the functor OnMerge is called, unless it is equal to Null_functor. This functor allows the user to define its own custom behavior when two attributes are merged (for example if the information is a color, we can compute the average color of the two initial attributes, and affect this value to the first attribute, see example in Section Generalized Map With Attributes). Similarly, the functor OnSplit is called when one attribute is split in two, because its corresponding cell is split in two during some operation, unless it is equal to Null_functor. In any high level operation, OnMerge is called before to start the operation (i.e. before modifying the generalized map), and OnSplit is called when the operation is finished (i.e. after all the modifications were made).
In addition, there are dynamic onmerge and onsplit functions that can be associated to i-attributes, and modified, thanks to the onmerge_function() and onsplit_function(). When these functions are set, they are also called in addition to the previous mechanism when two attributes are merged or one attribute is split into two (see example in Section Use of Dynamic Onmerge and Onsplit Functors).
What we said for the dart also holds for the cell attribute. The generalized map can be used with any user defined model of the CellAttribute concept.
Here comes an example of two generalized map definitions. The first case Example_gmap4 defines a 4D generalized map which uses all the default values (Generic_map_min_items). The second example Example_custom_gmap3 uses its own model of the GenericMapItems concept. In this model, a double is associated as information on darts, and an attribute containing an integer is associated to edges.
An important operation in generalized maps consists in iterating over specific subsets of darts or over attributes. For that, several ranges are offered (see Section Iterating over Orbits, Cells, and Attributes). A range is a model of the Range concept, thus supporting the two methods begin() and end() allowing to iterate over all the elements in the range. Several functions allow to create specific configurations of darts into a generalized map (see Section Construction Operations). Darts can be marked during operations, for example when performing a breadth-first search traversal, thanks to Boolean marks (see Sections Boolean Marks). In the following, we denote by dh0, dh1, dh2 the dart handles for the darts d0, d1, d2, respectively. That is d0 == *dh0.
The generalized map offers iterators to traverse the darts of a specific orbit, to traverse all darts of one cell, or one dart per cell, and to traverse all i-attributes.
Instead of the begin()/end() member function pair as we know it from STL containers, and from most CGAL data structures, the generalized map defines range classes which are all models of the Range concept.
There are three different categories of dart range classes:
Dart_range: range of all the darts of a generalized map;
Dart_of_orbit_range<Alpha...>: range of all the darts of the orbit \( \langle{}\)Alpha... \( \rangle{}\)(d0) for a given d0. Alpha... is a sequence of integers \( i_1\),..., \( i_k\), each \( i_j\) \( \in \) {0, ..., d}. These integers must satisfy: \( i_1\) \( < \) \( i_2\) \( < \)... \( < \) \( i_k\) (for example Dart_of_orbit_range<1,2> for the orbit \( \langle{}\) \( \alpha_1\), \( \alpha_2\) \( \rangle{}\)(d0));
Dart_of_cell_range<i,dim>: range of all the darts of the i-cell containing a given dart. The i-cell is considered in dimension dim (with 0 \( \leq \) dim \( \leq \) d, dim=d by default), with 0 \( \leq \) i \( \leq \) dim+1. If i=dim+1, Dart_of_cell_range<i,dim> is the range of all the darts of the connected component containing a given dart. There are also two different classes of ranges containing one dart per i-cell. Note that in these classes, the dart of each i-cell can be any dart of the cell. Moreover, each i-cell (and j-cell in the second case) is considered in dimension dim (with 0 \( \leq \) dim \( \leq \) d, dim=d by default).
One_dart_per_cell_range<i,dim>: range containing one dart of each i-cell of the generalized map, 0 \( \leq \) i \( \leq \) dim+1 (for example One_dart_per_cell_range<2> for the range of one dart per 2-cell of the generalized map);
One_dart_per_incident_cell_range<i,j,dim>: range containing one dart of each i-cell incident to the j-cell containing a given dart, with 0 \( \leq \) i \( \leq \) dim+1 and 0 \( \leq \) j \( \leq \) dim+1 (for example One_dart_per_incident_cell_range<0,3> for the range of one dart per vertex of the volume incident to the starting dart). If i=j, the range contains only the given dart. The iterators of the Dart_range are bidirectional iterators, while the iterators of the other four ranges are forward iterators. The value type of all these iterators is Dart thus all these iterators can be directly used as Dart_handle.
Additionally, there is a range over non void i-attributes: Attribute_range<i>::type, having a bidirectional iterator with value type Attribute_type<i>::type`.
For each range, there is an associated const range, a model of the ConstRange concept. You can find some examples of ranges in Section A 3D Generalized Map.
Several functions allow to create specific configurations of darts into a generalized map. Existing darts in the generalized map are not modified. Note that the dimension of the generalized map must be large enough: darts must contain all the \( \alpha\) pointers used by the operation. All these functions return a Dart_handle to a new dart created during the operation.
gm.make_edge(): creates an isolated edge (two darts linked by \( \alpha_0\)); dimension must be greater or equal than zero; gm.make_combinatorial_polygon(lg): creates an isolated combinatorial polygon of length lg (lg edges linked by \( \alpha_1\)), for lg>0; dimension must be greater or equal than one; gm.make_combinatorial_tetrahedron(): creates an isolated combinatorial tetrahedron (four combinatorial triangles linked together by \( \alpha_2\)); dimension must be greater or equal than two; gm.make_combinatorial_hexahedron(): creates an isolated combinatorial hexahedron (six combinatorial quadrangles linked together by \( \alpha_2\)); dimension must be greater or equal than two. It is often necessary to mark darts, for example to retrieve in O(1) if a given dart was already processed during a specific algorithm, for example, iteration over a given range. Users can also mark specific parts of a generalized map (for example mark all the darts belonging to objects having specific semantics). To answer these needs, a GeneralizedMap has a certain number of Boolean marks (fixed by the constant NB_MARKS). When one wants to use a Boolean mark, the following methods are available (with gm an instance of a generalized map):
size_type m = gm.get_new_mark() (throws the exception Exception_no_more_available_mark if no mark is available); m for a given dart d0: gm.mark(dh0,m); m for a given dart d0: gm.unmark(dh0,m); d0 is marked for m: gm.is_marked(dh0,m); gm for m: gm.unmark_all(m); m of all the darts of gm: gm.negate_mark(m). All the marked darts become unmarked and all the unmarked darts become marked; m: gm.free_mark(m). This method unmarks all the darts of gm for m before freeing it. It is important to free a mark when it is no longer needed, otherwise you may at some point run out of marks.
The following example illustrates how to use marks. Two combinatorial tetrahedra are created and 3-sewn (see Section Sewing Orbits and Linking Darts for a detailed description of the sew operation). Then a mark is reserved and used to mark all the darts belonging to the first combinatorial tetrahedron. Finally, these tetrahedron are merged. The marks allow us to know which darts come from the first and second tetrahedron.
File Generalized_map/gmap_3_marks.cpp
Several operations allow to modify a given generalized map. There are two main categories of modification operations:
The GeneralizedMap defines two groups of methods to modify the \( \alpha\) pointers of existing darts.
The sew and unsew methods iterate over two orbits in order to link or unlink specific darts two by two. Intuitively, a sew<i> operation glues two i-cells by identifying two of their (i-1)-cells (see example in Figure 28.11 where sew<3> is used to glue two 3-cells along one 2-cell). Reciprocally, a unsew<i> operation un-glues two i-cells which were glued along one of their (i-1)-cells. These methods guarantee that given a valid generalized map and a possible operation we obtain a valid generalized map as result of the operation.
The link_alpha and unlink_alpha methods only modify the pointer of two darts: the obtained generalized maps may be not valid. These operations can be useful to use low level operations in a specific algorithm, for example to modify locally a generalized map in a really fast way. In such a case, additional operations may be needed to restore the validity conditions.
Linking two darts d1 and d2 by \( \alpha_i\), with 0 \( \leq \) i \( \leq \) d and d1 \( \neq \) d2, consists in modifying two \( \alpha_i\) pointers such that \( \alpha_i\)(d1)=d2 and \( \alpha_i\)(d2)=d1.
Reciprocally, unlinking a given dart d0 by \( \alpha_i\), with 0 \( \leq \) i \( \leq \) d, consists in modifying two \( \alpha_i\) pointers such that \( \alpha_i\)( \( \alpha_i\)(d0))= \( \alpha_i\)(d0) and \( \alpha_i\)(d0)=d0. Note that is it possible to unlink a given dart for \( \alpha_i\) only if it is not i-free.

sew<3>(1,a) (or sew<3>(2,b) ... or sew<3>(8,h)). Darts (1,a), ..., (8,h) are linked together by \( \alpha_3\). The two 2-cells c1={1,...,8} and c2={a,...,h} are merged after the sew into the 2-cell {1,...,8,a,...,h}. We are in the case where the two attributes are non NULL, thus the first one is kept, and all the darts of c2 are associated with the first attribute. The sew<i>(dh1,dh2) method consists mainly to link two by two several darts by \( \alpha_i\). This operation is possible only if there is a bijection f between all the darts of the orbit D1= \( \langle{}\) \( \alpha_1\),..., \( \alpha_{i-2}\), \( \alpha_{i+2}\),..., \( \alpha_d\) \( \rangle{}\)(d1) and D2= \( \langle{}\) \( \alpha_1\),..., \( \alpha_{i-2}\), \( \alpha_{i+2}\),..., \( \alpha_d\) \( \rangle{}\)(d2) satisfying: f(d1)=d2, and for all e \( \in \) D1, for all j \( \in \) {1,..., i-2,i+2,...,d}, f( \( \alpha_j\)(e))= \( \alpha_j^{-1}\)(f(e)). Intuitively, this condition ensures the validity of the generalized map by verifying that condition discussed in Section Generalized Map Properties will be satisfied after the operation. This condition can be tested by using the method is_sewable<i>(dh1,dh2). For example, the function is_sewable<3> would return false if we tried to 3-sew a triangular facet with a quad facet. Note that given two darts d1 and d2, if there is such a bijection, it is uniquely defined. So giving the two darts as arguments of the sew<i> is enough to retrieve all the pairs of darts to link. If such a bijection exists, the sew<i>(dh1,dh2) operation consists only in linking by \( \alpha_i\) each couple of darts d3 and d4 such that d3=f(d4).
In addition, the sew operation updates the associations between darts and non void attributes in order to guarantee that all the darts belonging to a given cell are associated with the same attribute (which is a condition of generalized map validity). For each couple of j-cells c1 and c2 that are merged into one j-cell during the sew, we have to update the two associated attributes attr1 and attr2. If both are NULL, there is nothing to do. If one is NULL and the other not, we only associate the non NULL attribute to all the darts of the resulting cell. When the two attributes are non NULL, we first apply functor On_merge on the two attributes attr1 and attr2 (see Section Cell Attributes). Then, we associate the attribute attr1 to all darts of the resulting j-cell. Finally, attribute attr2 is removed from the generalized map.
Note that when the two attributes are non NULL, the first one is kept. But user can customize this behavior in order to update the information contained in the attributes according to its needs. For that, we can define a specific functor, and use it as template argument for On_merge parameter of the Cell_attribute definition. This functor can for example copy the information of the second attribute in the information of the first one to make as if the second attribute is kept.
For example, in Figure 28.11, we want to 3-sew the two initial volumes. sew<3>(1,a) links by \( \alpha_3\) the pairs of darts (1,a), ..., (8,g), thus the generalized map obtained is valid. 2-attributes are updated so that all the darts belonging to the 2-cell containing dart 1 become associated to the same 2-attribute after the operation.
Similarly, unsew<i>(dh0) operation unlinks \( \alpha_i\) for all the darts in the orbit \( \langle{}\) \( \alpha_1\),..., \( \alpha_{i-2}\), \( \alpha_{i+2}\),..., \( \alpha_d\) \( \rangle{}\)(d0), and thus guarantees to obtain a valid generalized map. This operation is possible for any non i-free dart.
As for the sew operations, attributes are updated to guarantee that two darts belonging to two different j-cells are associated to two different j-attributes. If the unsew operation splits a j-cell c in two j-cells c1 and c2, and if c is associated to a j-attribute attr1, then this attribute is duplicated into attr2, and all the darts belonging to c2 are associated with this new attribute. Finally, we call the functor On_split on the two attributes attr1 and attr2 (see Section Cell Attributes).
Let us consider the generalized map given in Figure 28.11 (Right). If we call unsew<3>(1), we obtain the generalized map in Figure 28.11 (Left) (except for the color of the attribute associated to the 2-cell {a,...,g} which would be #00ff00). The unsew<3> operation has duplicated the 2-attribute associated to the initial 2-cell {1,...,8,a,...,g} since this 2-cell is split in two after the unsew operation.
If one wants to modify a generalized map manually, it is possible to switch off the updating between darts and attributes by calling set_automatic_attributes_management(false) before to call sew<i>(dh1,dh2) and unsew<i>(dh0). In these cases, the generalized map obtained may be no longer valid due to incorrect associations between darts and attributes. A call later to set_automatic_attributes_management(true) will correct the invalid non void attributes.
In Figure 28.11 (Left), if we call sew<3>(1,5), the resulting generalized map is similar to the generalized map of Figure 28.11 (Right) (we have linked by \( \alpha_3\) the pairs of darts (1,a), ..., (8,g), but associations between darts and attributes are not valid. Indeed, we have kept the four initial attributes and all the associations between darts and attributes, thus two darts belonging to the same 2-cell (for example darts 1 and a) are associated with two different attributes.
We can also use the link_alpha<i>(dh1,dh2) which links d1 and d2 by \( \alpha_i\) without modifying the other links. Association between darts and attributes are only modified for darts d1 and d2, and similarly as for sew<i>, this updating can be avoided by calling set_automatic_attributes_management(false) before to call link_alpha<i>(dh1,dh2). Lastly, we can use unlink_alpha<i>(dh0) to unlink d0 for \( \alpha_i\). In this last case, there is no modification of association between darts and attributes.
In Figure 28.11 (Left), if we call link_alpha<3>(1,a), in the resulting generalized map we have now \( \alpha_3\)(1)=a and \( \alpha_3\)(a)=1. This generalized map is no longer valid (for example dart 2 is 3-free and we should have \( \alpha_3\)(2)=b).
Sewing operations can be used in order to build a non-orientable generalized map. Let us consider the 2D generalized map representing a square given in Figure 28.12 (Left). Two opposite edges of the square can be identified by using the sew<2> operation. But there are two possibilities to make this identification. The first one, shown in Figure 28.12 (Middle), creates an annulus which is thus orientable. The second one, shown in Figure 28.12 (Right), creates a Möbius strip which is thus non-orientable. The choice of the two darts for the sew operation is thus crucial. See the example A non orientable 2D Generalized Map.

sew<2>(1,3). This map is orientable and corresponds to an annulus. Right: the generalized map obtained from M after sew<2>(1,4). This map is non-orientable and corresponds to a Möbius strip. The following high level operations are defined. All these methods ensure that given a valid generalized map and a possible operation, the modified generalized map is also valid.
The first one is gm.remove_cell<i>(dh0) which modifies the generalized map to remove the i-cell containing dart d0, with 0 \( \leq \) i \( \leq \) d. This operation is possible if i=d or if the given i-cell is incident to at most two (i+1)-cells which can be tested thanks to gm.is_removable<i>(dh0). If the removed i-cell was incident to two different (i+1)-cells, these two cells are merged into one (i+1)-cell. In this case, the On_merge functor is called if two (i+1)-attributes are associated to the two (i+1)-cells. If the i-cell is associated with a non void attribute, it is removed from the generalized map (see three examples on Figure 28.13, Figure 28.15 and Figure 28.16).

insert_cell_0_in_cell_1 and remove_cell<0> operations. Left: Initial generalized map. Right: After the insertion of a 0-cell in the 1-cell containing dart d1. Now if we remove the 0-cell containing dart d2, we obtain the initial generalized map. The inverse operation of the removal is the insertion operation. Several versions exist, sharing a common principle. They consist in adding a new i-cell inside an existing j-cell, i \( < \)j, by splitting the j-cell into several j-cells. Contrary to remove_cell<i>, is it not possible to define a unique insert_cell_i_in_cell_j<i,j> function because parameters are different depending on i and j.
gm.insert_cell_0_in_cell_1(dh0) adds a 0-cell in the 1-cell containing dart d0. The 1-cell is split in two. This operation is possible if d0 \( \in \) gm.darts() (see example on Figure 28.13).
gm.insert_cell_0_in_cell_2(dh0) adds a 0-cell in the 2-cell containing dart d0. The 2-cell is split in triangles, one for each initial edge of the facet. This operation is possible if d0 \( \in \) gm.darts() (see example on Figure 28.14).

insert_cell_0_in_cell_2 operation. gm.insert_cell_1_in_cell_2(dh1,dh2) adds a 1-cell in the 2-cell containing darts d1 and d2, between the two 0-cells containing darts d1 and d2. The 2-cell is split in two. This operation is possible if d1 \( \in \) \( \langle{}\) \( \alpha_0, \alpha_1\) \( \rangle{}\)(d2) which can be tested thanks to gm.is_insertable_cell_1_in_cell_2(dh1,dh2). In the example on Figure 28.15, it is possible to insert an edge between darts d2 and d3, but it is not possible to insert an edge between d1 and d3.

insert_cell_1_in_cell_2 and remove_cell<1> operations. Left: Initial generalized map. Right: After the insertion of two 1-cells: a first one between the two 0-cells containing darts d2 and d3, and a second one incident to the 0-cell containing dart d1. Now if we remove the two 1-cells containing darts d4 and d5, we obtain the initial generalized map. gm.insert_dangling_cell_1_in_cell_2(dh0) adds a 1-cell in the 2-cell containing dart d0, the 1-cell being attached by only one of its vertex to the 0-cell containing dart d0. This operation is possible if d0 \( \in \) gm.darts().
gm.insert_cell_2_in_cell_3(itbegin,itend) adds a 2-cell in the 3-cell containing all the darts between itbegin and itend, along the path of 1-cells containing darts in [itbegin,itend). The 3-cell is split in two. This operation is possible if all the darts in [itbegin,itend) form a closed path inside a same 3-cell which can be tested thanks to gm.is_insertable_cell_2_in_cell_3(itbegin,itend) (see example on Figure 28.16).

insert_cell_2_in_cell_3 and remove_cell<2> operations. Left: Initial generalized map. Right: After the insertion of a 2-cell along the path of 1-cells containing respectively d1,d2,d3,d4. Now if we remove the 2-cell containing dart d5, we obtain the initial generalized map. As the sew operation, insertion operations could create non-orientable generalized map. This is for example the case if we start from the 3D generalized map given in Figure 28.15 (Left) and insert an edge not between darts d2 and d3 but between darts d2 and \( \alpha_1\)(d3).
Some examples of use of these operations are given in Section High Level Operations.
If set_automatic_attributes_management(false) is called, all the future insertion or removal operations will not update non void attributes. These attributes will be updated later by the call to set_automatic_attributes_management(true). This can be useful to speed up an algorithm which uses several successive insertion and removal operations. See example Automatic attributes management.
In this example, a 3-dimensional generalized map is constructed. Two combinatorial tetrahedra are created, then the numbers of cells of the generalized map are displayed, and the validity of the generalized map is checked. Then, we illustrate the use of ranges to iterate over specific darts. The first loop enumerates all the darts of the first tetrahedron by using the range Dart_of_orbit_range<0,1,2>, and the second loop enumerates all the darts of the facet containing dart dh2 by using the range Dart_of_orbit_range<0,1>.
File Generalized_map/gmap_3_simple_example.cpp
The output is:
#Darts=48, #0-cells=8, #1-cells=12, #2-cells=8, #3-cells=2, #ccs=2, orientable=true, valid=1 Number of darts of the first tetrahedron: 24 Number of darts of the face incident to d1: 6
which gives the number of darts of the generalized map, the numbers of different cells, the number of connected components, a Boolean showing if the generalized map is orientable or not and finally a Boolean showing the validity of the generalized map (a tetrahedron is made up of 48 darts because there are 12 darts per facet and there are 4 facets).
Note the creation in the for loops of the two instances of Dart_of_orbit_range::const_iterator: it is the current iterator, and itend an iterator to the end of the range. Having itend avoids calling gm.darts_of_orbit<0,1,2>(dh1).end() again and again as in the following example (which is a bad solution):
In this example, a square is constructed in a 2-dimensional generalized map. Then two darts belonging to two opposite edges of the square are 2-sewn. Since they darts do not belong to the same orientation of the initial square, this creates a torsion and thus leads to a non orientable generalized map which represents a Möbius strip (cf. Figure 28.12 (Right)).
The output is:
#Darts=8, #0-cells=2, #1-cells=3, #2-cells=1, #ccs=1, orientable=false, valid=1
showing that the generalized map is non orientable.
File Generalized_map/gmap_2_moebius.cpp
This example shows some uses of high level operations. First we create a combinatorial hexahedron, the generalized map obtained is shown in Figure 28.17 (Left). Then we insert two 1-cells along two opposite 2-cells of the hexahedron. The generalized map obtained is shown in Figure 28.17 (Middle). Finally, we insert a 2-cell in the diagonal of the hexahedron in order to split it into two parts. We obtain the generalized map shown in Figure 28.17 (Right). We display the characteristics of the generalized map and check its validity.
The second part of this example removes the inserted elements. First we remove the inserted 2-cell, then the two inserted 1-cells. We get back the initial combinatorial hexahedron, which is verified by displaying once again the characteristics of the generalized map.
File Generalized_map/gmap_3_operations.cpp
The output is:
#Darts=72, #0-cells=8, #1-cells=14, #2-cells=9, #3-cells=2, #ccs=1, orientable=true, valid=1 #Darts=48, #0-cells=8, #1-cells=12, #2-cells=6, #3-cells=1, #ccs=1, orientable=true, valid=1
The first line gives the characteristics of the generalized map after all the insertions (the generalized map drawn in Figure 28.17 (Right)). There are two 3-cells (since the combinatorial hexahedron was split in two by the 2-cell insertion), nine 2-cells (since two 2-cells of the original hexahedron were split in two by the two 1-cell insertions, and a new 2-cell was created during the 2-cell insertion), fourteen 1-cells (since there are two new 1-cells created by the 1-cell insertion) while the number of 0-cells remains unchanged.
The second line is the result after the removal operations. We retrieve the original combinatorial hexahedron since we have removed all the inserted elements.

In this example, a 4-dimensional generalized map is used. Two tetrahedral cells are created and sewn by \( \alpha_4\). Then the numbers of cells of the generalized map are displayed, and its validity is checked.
By looking at these numbers of cells, we can see that the 4D generalized map contains only one 3-cell. Indeed, the sew<4> operation has identified by pairs all the darts of the two 3-cells by definition of the sew operation (see Section Sewing Orbits and Linking Darts) which, in 4D, links by \( \alpha_3\) all the darts in \( \langle{}\) \( \alpha_1\), \( \alpha_2\) \( \rangle{}\)(d1) and in \( \langle{}\) \( \alpha_1\), \( \alpha_2\) \( \rangle{}\)(d2). The situation is similar (but in higher dimension) to the configuration where we have two triangles in a 3D generalized map, and you use sew<3> between these two triangles. The two triangles are identified since all their darts are linked by \( \alpha_3\), thus we obtain a 3D generalized map containing only one 3-cell. Note that this 3-cell is unbounded since the darts of the two triangles are all 2-free. In the 4D case, the 4-cell is unbounded since all its darts are 3-free.
In this example, we also illustrate how to use the basic methods to build by hand some specific configuration in a generalized map. In fact, these functions are already present in the package: function make_triangle(gm) is equivalent to gm.make_combinatorial_polygon(3) and make_tetrahedron(gm) is equivalent to gm.make_combinatorial_tetrahedron(). If we want to create a 4D simplex, we must create five 3D simplexes, and sew them correctly two by two by \( \alpha_3\) (and so on if you want to create higher dimensional generalized map).
File Generalized_map/gmap_4_simple_example.cpp
The output is:
#Darts=48, #0-cells=4, #1-cells=6, #2-cells=4, #3-cells=1, #4-cells=2, #ccs=1, orientable=true, valid=1
In the following example, we illustrate how to specify the 2-attributes in a 3D generalized map. For that, we define our own item class using Cell_attribute<GMap,int,Tag_true,Sum_functor,Divide_by_two_functor> as attributes which contain an int and which are associated to 2-cells of the generalized map.
Functors Sum_functor and Divide_by_two_functor define a custom behavior: when two attributes ca1 and ca2 are merged into ca1, the value of ca1 is the sum of the two initial values. When an attribute ca1 is split in the two attributes ca1 and ca2, the value of each attribute is half of the first value.
File Generalized_map/gmap_3_with_colored_facets.cpp
The output is:
20; 7; 7; 7; 7; 7; 13; 13; 13; 13; 13; 2; 7; 7; 7; 7; 7; 10; 13; 13; 13; 13; 13; 5; 2; #Darts=128, #0-cells=13, #1-cells=24, #2-cells=14, #3-cells=2, #ccs=1, orientable=true, valid=1
Before the gm.sew<3>, each 2-cell of the first cube is associated with an attribute having 7 as value, and each 2-cell of the second cube with an attribute having 13 as value. During the gm.sew<3>, two 2-cells are merged, thus the functor Sum_functor is called on the two associated 2-attributes, and the value of the new 2-cell is the sum of the two previous one: 20.
Then we call insert_cell_0_in_cell_2 on a dart which belong to this 2-cell. This method splits the existing 2-cell in k 2-cells, k being the number of 1-cells of the initial 2-cell (4 in this example). These splits are made consecutively, thus for the first split, we create a new attribute as copy of the initial one and call functor Divide_by_two_functor on these two attributes: the value of each attribute is thus 20/2=10. For the second split, the value of each attribute is thus 10/2=5, and for the last split the value of each attribute is thus 5/2=2 (remember that information contained in 2-attributes in an int). At the end, we obtain five 2-attributes with 7 as value, five 2-attributes with 13 as value, and four 2-attributes having respectively 2, 2, 5 and 10 as values.
In the following example, we show an example of use of dynamic onmerge and onsplit functor. We define our 3D generalized map with 2-attributes. Then we create two hexahedra and create all the 2-attributes, having their info initialized to 1.
Step 2 defines the onsplit and onmerge dynamic functors. We can see here that with this mechanism, functors can store data member. This is the case in the example for Split_functor which stores a reference to the generalized map.
The next operations will call these functors when 2-cells are split or merged. The sew<3> operation calls 1 onmerge as two faces are identified; the insert_cell_0_in_cell_2 operation calls 3 onsplit as one face is split in 4.
Lastly we remove the dynamic onmerge functor (step 7). This is done by initializing the fonctor to a default boost::function. After this initialization, no dynamic merge functor is called when two faces are merged.
File Generalized_map/gmap_3_dynamic_onmerge.cpp
The definition of generalized map in any dimension is given in [2], [3]. See also the book [1] which regroups many definitions, operations and algorithms about combinatorial and generalized maps.
An involution on a finite set E is a mapping f from E to E which is bijective and equal to its inverse. Thus \( \forall \) e \( \in \) E, we have f(e) = \( f^{-1}\)(e) and f(f(e))=e.
Let d \( \geq\) 0. A d-dimensional generalized map (or d-Gmap) is a (d+1)-tuple G=(D, \( \alpha_0\),..., \( \alpha_d\)) where:
A d-dimensional generalized map represents a subdivision of an orientable or non-orientable d-dimensional quasi-manifold. A dart is an abstract element which is only required to define involutions. The last line of the definition fixes constraints which guarantee the topological validity of the represented object, i.e., the fact that it is a quasi-manifold. This definition allows us to verify the validity of a given generalized map by checking if each item of the definition is satisfied.
Given a set of involutions S= \(\{f_1\),..., \( f_k\}\), we denote by \( \langle{}\) S \( \rangle{}\) the permutation group generated by \(\{f_1\),..., \( f_k\}\) and whose group operation is the composition of involutions. The orbit \( \langle{}\) \( f_1\),..., \( f_k\) \( \rangle{}\)(a) is the set of darts which can be obtained from a by elements of \( \langle{}\) S \( \rangle{}\): \( \langle{}\) \( f_1\),..., \( f_k\) \( \rangle{}\)(a)= \(\{ \phi\)(a) \( |\) \( \phi\) \( \in \) \( \langle{}\)S \( \rangle{}\}\).
Let d0 \( \in \) D be a dart. Given i, 0 \( \leq \) i \( \leq \) d, the i-cell containing d0 is \( \langle{}\) \( \alpha_0\),..., \( \alpha_{i-1}\), \( \alpha_{i+1}\),..., \( \alpha_d\) \( \rangle{}\)(d0).
The code of this package followed the code of Combinatorial maps and was inspired by Moka, a 3D topological modeler that uses 3D generalized maps (http://moka-modeller.sourceforge.net/).
 1.8.4
1.8.4