

|
CGAL 4.12.2 - Classification
|
|
CGAL 4.12.2 - Classification
|
#include <CGAL/Classification/Feature/Hsv.h>
CGAL::Classification::Feature_base.
Feature based on HSV colorimetric information.
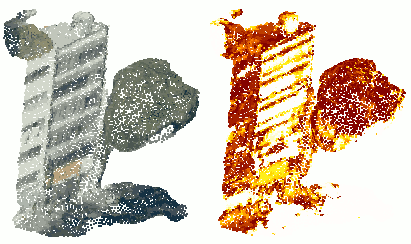
If the input point cloud has colorimetric information, it can be used for classification purposes. This feature is based on a Gaussian probabilistic model on one of the three HSV channels (hue, saturation or value). It computes the probability of the color of the input point to match this specific color channel defined by a mean and a standard deviation.
The HSV channels are defined this way:
For example, such an feature using the channel 0 (hue) with a mean of 90 (which corresponds to a green hue) can help to identify trees.
Its default name is the channel followed by the mean value (for example: "hue_180", "saturation_20" or "value_98").
| GeomTraits | model of CGAL Kernel. |
| PointRange | model of ConstRange. Its iterator type is RandomAccessIterator and its value type is the key type of ColorMap. |
| ColorMap | model of ReadablePropertyMap whose key type is the value type of the iterator of PointRange and value type is CGAL::Classification::RGB_Color. |
Public Types | |
| enum | Channel { HUE = 0, SATURATION = 1, VALUE = 2 } |
| Selected channel. More... | |
Public Member Functions | |
| Hsv (const PointRange &input, ColorMap color_map, Channel channel, float mean, float sd) | |
| Constructs a feature based on the given color channel, mean and standard deviation. More... | |
 Public Member Functions inherited from CGAL::Classification::Feature_base Public Member Functions inherited from CGAL::Classification::Feature_base | |
| const std::string & | name () const |
Returns the name of the feature (initialized to abstract_feature for Feature_base). | |
| void | set_name (const std::string &name) |
| Changes the name of the feature. | |
| virtual float | value (std::size_t index)=0 |
Returns the value taken by the feature for at the item for the item at position index. More... | |
| enum CGAL::Classification::Feature::Hsv::Channel |
| CGAL::Classification::Feature::Hsv< GeomTraits, PointRange, ColorMap >::Hsv | ( | const PointRange & | input, |
| ColorMap | color_map, | ||
| Channel | channel, | ||
| float | mean, | ||
| float | sd | ||
| ) |
Constructs a feature based on the given color channel, mean and standard deviation.
| input | point range. |
| color_map | property map to access the colors of the input points. |
| channel | chosen HSV channel. |
| mean | mean value of the specified channel. |
| sd | standard deviation of the specified channel. |
 1.8.13
1.8.13