

|
CGAL 4.9.1 - Planar Parameterization of Triangulated Surface Meshes
|
|
CGAL 4.9.1 - Planar Parameterization of Triangulated Surface Meshes
|
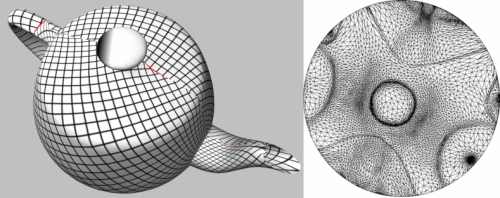
Parameterizing a surface amounts to finding a one-to-one mapping from a suitable domain to the surface. A good mapping is the one which minimizes either angle distortions (conformal parameterization) or area distortions (equiareal parameterization) in some sense. In this package, we focus on parameterizing triangulated surfaces which are homeomorphic to a disk, and on piecewise linear mappings onto a planar domain.
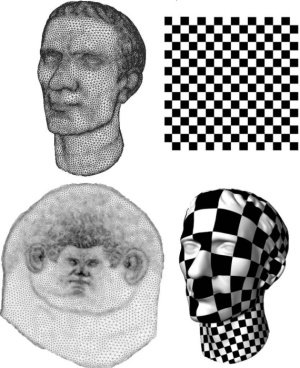
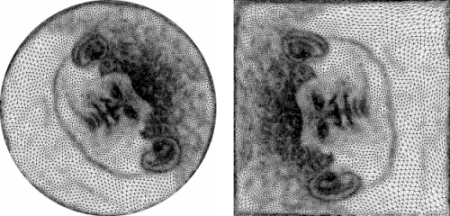
Although the main motivation behind the first parameterization methods was the application to texture mapping, it is now frequently used for mapping more sophisticated modulation signals (such as normal, transparency, reflection or light modulation maps), fitting scattered data, re-parameterizing spline surfaces, repairing CAD models, approximating surfaces and remeshing.
This CGAL package implements some of the state-of-the-art surface parameterization methods, such as least squares conformal maps, discrete conformal map, discrete authalic parameterization, Floater mean value coordinates or Tutte barycentric mapping. These methods mainly distinguish by the distortion they minimize (angles vs. areas), by the constrained border onto the planar domain (convex polygon vs. free border) and by the guarantees provided in terms of bijective mapping.
The package proposes currently an interface with the Polyhedron_3 data structure.
Since parameterizing meshes require efficient representation of sparse matrices and efficient iterative or direct linear solvers, we provide a unified interface to linear solvers as described in Chapter CGAL and Solvers.
Note that linear solvers commonly use double precision floating point numbers. Therefore, this package is intended to be used with a CGAL Cartesian kernel with doubles.
The intended audience of this package is researchers, developers or students developing algorithms around parameterization of triangle meshes for geometry processing as well as for signal mapping on triangulated surfaces.
From the user point of view, the simplest entry point to this package is the following function:
The function parameterize() applies a default surface parameterization method, namely Floater Mean Value Coordinates [5], with an arc-length circular border parameterization, and using a sparse linear solver from the Eigen library. The ParameterizationMesh_3 concept defines the input meshes handled by parameterize(). See Section Input Mesh for parameterize(). The result is stored into the (u,v) fields of the mesh halfedges. The mesh must be a triangle mesh surface with one connected component.
Note: Parameterizer_traits_3<ParameterizationMesh_3> is the (pure virtual) superclass of all surface parameterizations and defines the error codes.
The input meshes handled directly by parameterize() must be models of ParameterizationMesh_3, triangulated, 2-manifold, oriented, and homeomorphic to discs (possibly with holes).
Note: ParameterizationMesh_3 is a general concept to access a polyhedral mesh. It is optimized for the Surface_mesh_parameterization package only in the sense that it defines the accessors to fields specific to the parameterization domain (index, u, v, is_parameterized). The extra constraints needed by the surface parameterization methods (triangulated, 2-manifold, homeomorphic to a disc) are not part of the concept and are checked at runtime.
This package provides a model of the ParameterizationMesh_3 concept to access Polyhedron_3<Traits>:
Parameterization_polyhedron_adaptor_3<Polyhedron_3_>
We will see later that parameterize() can support indirectly meshes that are not topological disks.
In the following example, we apply the default parameterization to a Polyhedron_3<Traits> mesh (must be a topological disk). Eventually, it extracts the result from halfedges and prints it.
File Surface_mesh_parameterization/Simple_parameterization.cpp
This package provides a second parameterize() entry point where the user can specify a parameterization method:
It computes a one-to-one mapping from a 3D triangle surface mesh to a simple 2D domain. The mapping is piecewise linear on the triangle mesh. The result is a pair (u,v) of parameter coordinates for each vertex of the input mesh. One-to-one mapping may be guaranteed or not, depending on the chosen ParametizerTraits_3 algorithm.
The mesh must be a triangle surface mesh with one connected component, and the mesh border must be mapped onto a convex polygon (for fixed border parameterizations).
This CGAL package implements surface parameterization methods, such as Least Squares Conformal Maps, Discrete Conformal Map, Discrete Authalic Parameterization, Floater Mean Value Coordinates or Tutte Barycentric Mapping. These methods are provided as models of the ParameterizerTraits_3 concept. See Section Surface Parameterization Methods.
Each of these surface parameterization methods is templated by the input mesh type, a border parameterization and a solver:
Parameterization methods for borders are used as traits classes modifying the behavior of ParameterizerTraits_3 models. They are provided as models of the BorderParameterizer_3 concept. See Sections Border Parameterizations for Fixed Methods and Border Parameterizations for Free Methods.
This package solves sparse linear systems using solvers which are models of SparseLinearAlgebraTraits_d. See Chapter CGAL and Solvers.
As described in Section Input Mesh for parameterize() the input meshes handled by parameterize() must be models of the ParameterizationMesh_3 concept. The surface parameterization methods provided by this package only support surfaces which are homeomorphic to disks, possibly with holes. Nevertheless meshed with arbitrary topology and number of connected components can be parameterized, provided that the user specifies a cut graph (an oriented list of vertices) which is the border of a topological disc. If no cut graph is specified as input, the longest border of the input mesh is taken by default, the others being considered as holes.
For this purpose, the Parameterization_mesh_patch_3<ParameterizationPatchableMesh_3> class is responsible for virtually cutting a patch into a ParameterizationPatchableMesh_3 mesh. The resulting patch is a topological disk (if the input cutting path is correct) and provides a ParameterizationMesh_3 interface. It can be used as parameter for the function parameterize().
ParameterizationPatchableMesh_3 inherits from ParameterizationMesh_3, thus is a concept for a 3D surface mesh. ParameterizationPatchableMesh_3 adds the ability to support patches and virtual seams. Patches are a subset of a 3D mesh. Virtual seams behave as if the surface was cut along a cut graph. More information is provided in Section Cutting a Mesh.
This CGAL package implements some of the state-of-the-art surface parameterization methods, such as Least Squares Conformal Maps, Discrete Conformal Map, Discrete Authalic Parameterization, Floater Mean Value Coordinates or Tutte Barycentric Mapping. These methods are provided as models of the ParameterizerTraits_3 concept.
Fixed Border Surface Parameterizations need a set of constraints: two (u,v) coordinates for each vertex along the border. Such border parameterizations are described in Section Border Parameterizations for Fixed Methods.
Barycentric_mapping_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>
The Barycentric Mapping parameterization method has been introduced by Tutte [9]. In parameter space, each vertex is placed at the barycenter of its neighbors to achieve the so-called convex combination condition. This algorithm amounts to solve one sparse linear solver for each set of parameter coordinates, with a #vertices x #vertices sparse and symmetric positive definite matrix (if the border vertices are eliminated from the linear system). A coefficient \( (i, j)\) of the matrix is set to 1 for an edge linking the vertex \( v_i\) to the vertex \( v_j\), to minus the degree of the vertex \( v_i\) for a diagonal element, and to 0 for any other matrix entry. Although a bijective mapping is guaranteed when the border is convex, this method does not minimize angles nor areas distortion.
Discrete_conformal_map_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>
Discrete conformal map parameterization has been introduced by Eck et al. to the graphics community [3]. It attempts to lower angle deformation by minimizing a discrete version of the Dirichlet energy as derived by Pinkall and Polthier [8]. A one-to-one mapping is guaranteed only when the two following conditions are fulfilled: the barycentric mapping condition (each vertex in parameter space is a convex combination if its neighboring vertices), and the border is convex. This method solves two #vertices x #vertices sparse linear systems. The matrix (the same for both systems) is sparse and symmetric definite positive (if the border vertices are eliminated from the linear system and if the mesh contains no hole), thus can be efficiently solved using dedicated linear solvers.
Mean_value_coordinates_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>
The mean value coordinates parameterization method has been introduced by Floater [5]. Each vertex in parameter space is optimized so as to be a convex combination of its neighboring vertices. The barycentric coordinates are this time unconditionally positive, by deriving an application of the mean theorem for harmonic functions. This method is in essence an approximation of the discrete conformal maps, with a guaranteed one-to-one mapping when the border is convex. This method solves two #vertices x #vertices sparse linear systems. The matrix (the same for both systems) is asymmetric.
Discrete_authalic_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>
The discrete authalic parameterization method has been introduced by Desbrun et al. [2]. It corresponds to a weak formulation of an area-preserving method, and in essence locally minimizes the area distortion. A one-to-one mapping is guaranteed only if the convex combination condition is fulfilled and the border is convex. This method solves two #vertices x #vertices sparse linear systems. The matrix (the same for both systems) is asymmetric.
Parameterization methods for borders are used as traits classes modifying the behavior of ParameterizerTraits_3 models. They are provided as models of the BorderParameterizer_3 concept. Border parameterizations for fixed border surface parameterizations are a family of methods to define a set of constraints, namely two \( u,v\) coordinates for each vertex along the border.
The user can select a border parameterization among two commonly used methods: uniform or arc-length parameterization.
Usage:
Uniform border parameterization is more stable, although it gives poor visual results. The arc-length border parameterization is used by default.
One convex shape specified by one shape among two standard ones: a circle or a square.
Usage:
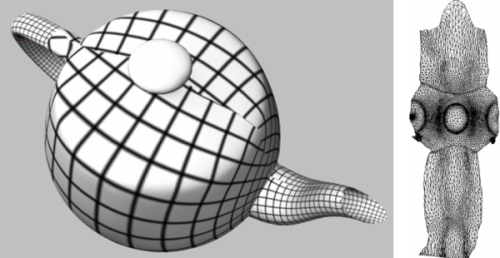
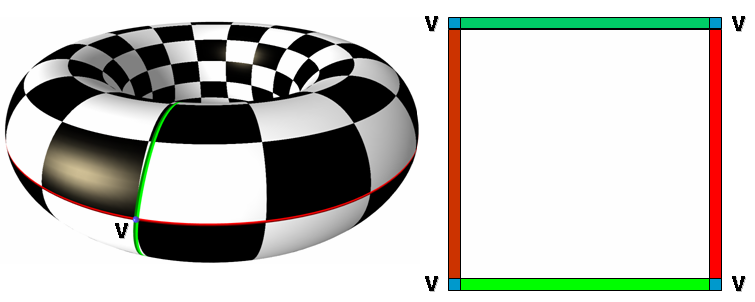
The circular border parameterization is used by default as it corresponds to the simplest convex shape. The square border parameterization is commonly used for texture mapping.
Circular_border_arc_length_parameterizer_3<ParameterizationMesh_3>
Circular_border_uniform_parameterizer_3<ParameterizationMesh_3>
Square_border_arc_length_parameterizer_3<ParameterizationMesh_3>
Square_border_uniform_parameterizer_3<ParameterizationMesh_3>
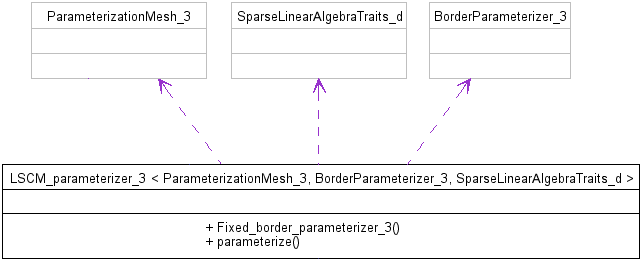
LSCM_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>
The Least Squares Conformal Maps (LSCM) parameterization method has been introduced by Lévy et al. [7]. It corresponds to a conformal method with a free border (at least two vertices have to be constrained to obtain a unique solution), which allows further lowering of the angle distortion. A one-to-one mapping is not guaranteed by this method. It solves a (2 \( \times\) #triangles) \( \times\) #vertices sparse linear system in the least squares sense, which implies solving a symmetric matrix.
Parameterization methods for borders are used as traits classes modifying the behavior of ParameterizerTraits_3 models. They are provided as models of the BorderParameterizer_3 concept. The border parameterizations associated to free border surface parameterization methods define only two constraints: the pinned vertices.
Two_vertices_parameterizer_3<ParameterizationMesh_3>
Usage:
Two_vertices_parameterizer_3<ParameterizationMesh_3> is the default free border parameterization, and is the only one available in the current version of this package.
In the following example, we compute a Discrete Authalic parameterization over a Polyhedron_3<Traits> mesh. Specifying a specific surface parameterization instead of the default one means using the second parameter of parameterize(). The differences with the first example Simple_parameterization.cpp are:
In the following example, we compute a Floater mean value coordinates parameterization with a square border arc length parameterization. Specifying a specific border parameterization instead of the default one means using the second parameter of Mean_value_coordinates_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d>. The differences with the first example Simple_parameterization.cpp are:
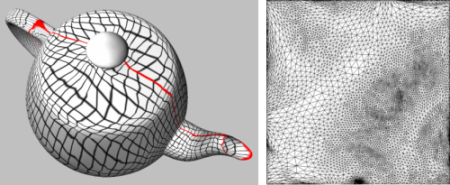
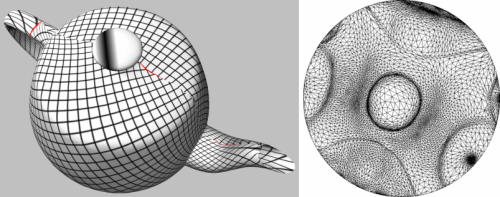
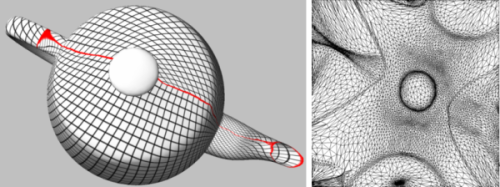
All surface parameterization methods proposed in this package only deal with meshes which are homeomorphic (topologically equivalent) to discs. Nevertheless meshes with arbitrary topology and number of connected components car be parameterized, provided that the user specifies a cut graph (an oriented list of vertices), which is the border of a topological disc. If no cut graph is provided as input, the longest border already in the input mesh is taken as default border, all other borders being considered as holes. Note that only the inside part (i.e., one connected component) of the given border is parameterized.
This package does not provide any algorithm to transform an arbitrary mesh into a topological disk, the user being responsible for generating such a cut graph. Nevertheless, we provide in polyhedron_ex_parameterization.cpp a simple cutting algorithm for the sake of completeness.
The surface parameterization classes in this package only directly support surfaces which are homeomorphic to disks (models of ParameterizationMesh_3). This software design simplifies the implementation of all new parameterization methods.
The Parameterization_mesh_patch_3<ParameterizationPatchableMesh_3> class is responsible for virtually cutting a patch in a ParameterizationPatchableMesh_3 mesh. The resulting patch is a topological disk (if the cut graph is correct) and provides a ParameterizationMesh_3 interface. It can be used as parameter of parameterize().
ParameterizationPatchableMesh_3 inherits from concept ParameterizationMesh_3, thus is a concept for a 3D surface mesh. ParameterizationPatchableMesh_3 adds the ability to support patches and virtual seams. Patches are a subset of a 3D mesh. Virtual seams behave exactly as if the surface was cut along a certain graph.
The ParameterizationMesh_3 interface with the Polyhedron is both a model of ParameterizationMesh_3 and ParameterizationPatchableMesh_3:
Parameterization_polyhedron_adaptor_3<Polyhedron_3_>
Note that this class is a decorator which adds on the fly the necessary fields to unmodified CGAL data structures (using STL maps). For better performances, it is recommended to use CGAL data structures enriched with the proper fields. See Polyhedron_ex class in polyhedron_ex_parameterization.cpp example.
In the following example, we virtually cut a Polyhedron_3<Traits> mesh to make it a topological disk, then applies the default parameterization:
File Surface_mesh_parameterization/Mesh_cutting_parameterization.cpp
Parameterization methods compute \( (u,v)\) fields for each vertex of the input mesh, with the seam vertices being virtually duplicated (thanks to Parameterization_mesh_patch_3<ParameterizationPatchableMesh_3>). To support this duplication, Parameterization_polyhedron_adaptor_3<Polyhedron_3_> stores the result in the \( (u,v)\) fields of the input mesh halfedges. A \( (u,v)\) pair is computed for each inner vertex (i.e. its halfedges share the same \( (u,v)\) pair), while a \( (u,v)\) pair is computed for each border halfedge. The user has to iterate over the mesh halfedges to get the result. Note that \( (u,v)\) fields do not exist in Polyhedron_3<Traits>, thus the output traversal is specific to the way the (u,v) fields are implemented by the adaptor.
The follwing example is a complete parameterization example which outputs the resulting parameterization to a EPS file. It gets the \( (u,v)\) fields computed by a parameterization method over a Polyhedron_3<Traits> mesh with a Parameterization_polyhedron_adaptor_3<Polyhedron_3_> adaptor:
File Surface_mesh_parameterization/Complete_parameterization_example.cpp
Fixed boundaries
One-to-one mapping
Tutte's theorem guarantees a one-to-one mapping provided that the weights are all positive and the border convex. It is the case for Tutte barycentric mapping and Floater mean value coordinates. It is not always the case for discrete conformal map (cotangents) and discrete authalic parameterization.
Non-singularity of the matrix
Geshorgin's theorem guarantees the convergence of the solver if the matrix is diagonal dominant. This is the case with positive weights (Tutte barycentric mapping and Floater mean value coordinates).
Free boundaries
One-to-one mapping
No guarantee is provided by LSCM (both global overlaps and triangle flips can occur).
Non-singularity of the matrix
For LSCM, the matrix of the system is the Gram matrix of a matrix with maximal rank, and is therefore non-singular (Gram theorem).
This package's entry point is:
You may notice that these global functions simply call the parameterize() method of a ParameterizerTraits_3 object. The purpose of these global functions is:
convex_hull_2(), You may also wonder why there is not just one parameterize() function with a default ParameterizerTraits_3 argument equal to Mean_value_coordinates_parameterizer_3<ParameterizationMesh_3>. The reason is simply that this is not allowed by the C++ standard (see [1], paragraph 14.1/9).
ParameterizerTraits_3 models modify the behavior of the global function parameterize() - hence the Traits in the name. On the other hand, ParameterizerTraits_3 models do not modify the behavior of a common parameterization algorithm - as you might expect.
In this package, we focus on triangulated surfaces that are homeomorphic to a disk and on piecewise linear mappings onto planar domains. A consequence is that the skeleton of all parameterization methods of this package is the same:
It is tempting to make the parameterization method a traits class that modifies the behavior of a common parameterization algorithm. On the other hand, there are several differences among methods:
Therefore, the software design chosen is:
ParameterizerTraits_3 model implements its own version of the parameterization algorithm as a parameterize() method. ParameterizerTraits_3 model has template arguments defining the border parameterization and sparse linear solver to use, with default values adapted to the method. 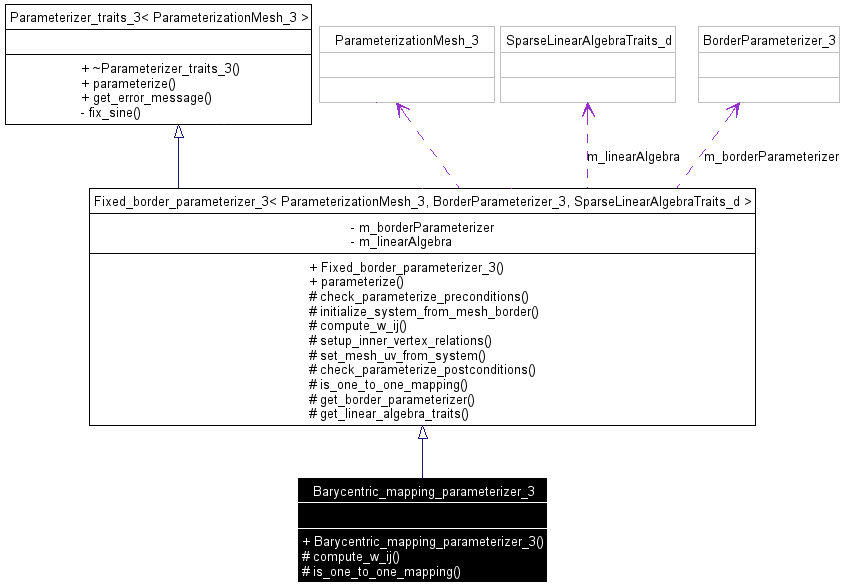
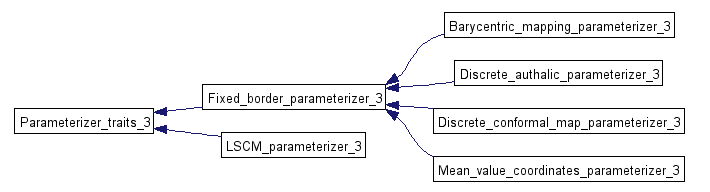
Parameterizer_traits_3<ParameterizationMesh_3> is the (pure virtual) superclass of all surface parameterization classes.Linear fixed border parameterization algorithms are very close. They mainly differ by the energy that they try to minimize, i.e. by the value of the \( w_{ij}\) coefficient of the \( A\) matrix, for \( v_i\) and \( v_j\) neighbor vertices of the mesh [4]. One consequence is that most of the code of the fixed border methods is factorized in the Fixed_border_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d> class.
Subclasses:
BorderParameterizer_3 and SparseLinearAlgebraTraits_d default template parameters that make sense, compute_w_ij() to compute \( w_{ij}\) = (i, j) coefficient of matrix \( A\) for \( v_j\) neighbor vertex of \( v_i\), is_one_to_one_mapping(). See Barycentric_mapping_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d> class as an example.
Border Parameterizations are models of the BorderParameterizer_3 concept. To simplify the implementation, BorderParameterizer_3 models know only the ParameterizationMesh_3 mesh class. They do not know the parameterization algorithm or the sparse linear solver used.
All parameterization methods are templated by the kind of mesh they are applied on. The mesh type must be a model of ParameterizationMesh_3.
The purpose of such a model is to:
index, u, v, is_parameterized). Two options are possible for 1) and 2):
boost::graph_traits<> and the property maps. The current design of this package uses the second option, which is simpler. Of course, we may decide at some point to switch to the first one to reach a deeper integration of CGAL with Boost.
Point 3) is solved by class Parameterization_mesh_patch_3<ParameterizationPatchableMesh_3>, which takes care of virtually cutting a patch in a ParameterizationPatchableMesh_3 mesh, to make it appear as a topological disk with a ParameterizationMesh_3 interface. ParameterizationPatchableMesh_3 inherits from concept ParameterizationMesh_3 and adds the ability to support patches and virtual seams.
This mainly means that:
index, u, v, is_parameterized) can be set per corner (which is a more general way of saying per half-edge). In this package, we focus on triangulated surfaces that are homeomorphic to a disk.
Computing a cutting path that transforms a closed mesh of arbitrary genus into a topological disk is a research topic on its own. This package does not intend to cover this topic at the moment.
Implementing a new fixed border linear parameterization is easy. Most of the code of the fixed border methods is factorized in the Fixed_border_parameterizer_3<ParameterizationMesh_3, BorderParameterizer_3, SparseLinearAlgebraTraits_d> class. Subclasses must mainly implement a compute_w_ij() method which computes each \( w_{ij}\) = \( (i, j)\) coefficient of the matrix \( A\) for \( v_j\) neighboring vertices of \( v_i\).
Although implementing a new free border linear parameterization method is more challenging, the Least Squares Conformal Maps parameterization method provides a good starting point.
Implementing non linear parameterizations is a natural extension to this package, although only the mesh adaptors can be reused.
Implementing a new border parameterization method is easy. Square, circular and two-points border parameterizations are good starting points.
Obviously, this package would benefit of having robust algorithms which transform arbitrary meshes into topological disks.
 1.8.4
1.8.4