56.1 Introduction
This Cgal component implements methods to analyze and process unorganized 3D point sets. The input is an unorganized 3D point set, possibly with normal attributes (unoriented or oriented). This point set can be analyzed to measure geometric properties such as average spacing between the points and their K nearest neighbors. It can be processed with functions devoted to the simplification, outlier removal, smoothing, normal estimation and normal orientation. The processing of point sets is often needed in applications dealing with measurement data, such as surface reconstruction from laser scanned data (see Figure 56.1).

Figure 56.1: Point set processing. Left: 275K points sampled on the statue of an elephant with a Minolta laser scanner. Right: point set after clean-up and simplification to 17K points.
In the context of surface reconstruction we can position the elements of this component along the common surface reconstruction pipeline (Figure 56.2) which involves the following steps: 1) Scanning and scan alignment to produce a set of points or points with normals (alignment is not yet covered in Cgal); 2) Outlier removal; 3) Simplification to reduce the number of input points; 4) Smoothing to reduce noise in the input data; 5) Normal estimation and orientation when the normals are not already provided by the acquisition device; and 6) Surface reconstruction. Chapter Surface_reconstruction_points_3 47 deals with surface reconstruction from point sets with normal attributes.
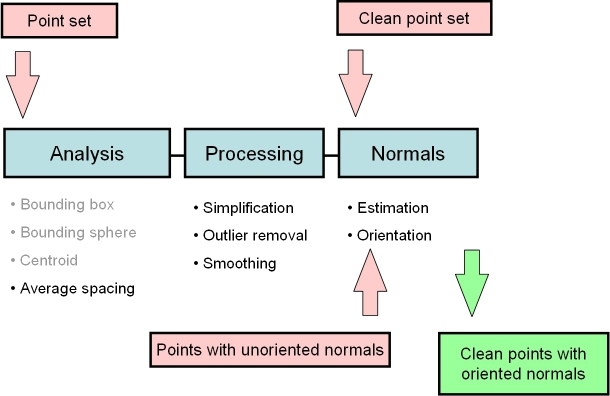
Figure 56.2: Point set processing pipeline for surface reconstruction. The algorithms listed in gray are available from other CGAL components (bounding volumes and principal component analysis).
56.2 Input/Output
56.2.1 Property Maps
The algorithms of this component take as input parameters iterator ranges of 3D points, or of 3D points with normals. The property maps are used to access the point or normal information from the input data, so as to let the user decide upon the implementation of a point with normal. The latter can be represented as, e.g., a class derived from the Cgal 3D point, or as a std::pair<Point_3<K>, Vector_3<K> >, or as a boost::tuple<..,Point_3<K>, ..., Vector_3<K> >.The following classes described in Chapter 73 provide property maps for the implementations of points with normals listed above:
CGAL::Dereference_property_map<T>
CGAL::First_of_pair_property_map<Pair> and CGAL::Second_of_pair_property_map<Pair>
CGAL::Nth_of_tuple_property_map<N, Tuple>
Dereference_property_map<Point_3> is the default value of the position property map expected by all functions in this component.
See below examples using pair and tuple property maps.
Users of this package may use other types to represent positions and normals if they implement the corresponding property maps.
56.2.2 Streams
We provide functions to read and write sets of points or sets of points with normals from the following ASCII file formats: XYZ (three point coordinates x y z per line or three point coordinates and three normal vector coordinates x y z nx ny nz per line), and OFF (Object File Format) [Phi96]. CGAL::read_xyz_pointsCGAL::read_off_points
CGAL::write_off_points
CGAL::write_xyz_points
56.2.3 Example
The following example reads a point set from an input file and writes it to a file, both in the XYZ format. Positions and normals are stored in pairs and accessed through property maps.File: examples/Point_set_processing_3/read_write_xyz_point_set_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/property_map.h>
#include <CGAL/IO/read_xyz_points.h>
#include <CGAL/IO/write_xyz_points.h>
#include <utility> // defines std::pair
#include <vector>
#include <fstream>
// types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::Point_3 Point;
typedef Kernel::Vector_3 Vector;
// Point with normal vector stored as a std::pair.
typedef std::pair<Point, Vector> Pwn;
int main(void)
{
// Reads a .xyz point set file in points[].
// Note: read_xyz_points_and_normals() requires an output iterator
// over points and as well as property maps to access each
// point position and normal.
std::vector<Pwn> points;
std::ifstream in("data/oni.xyz");
if (!in ||
!CGAL::read_xyz_points_and_normals(
in,std::back_inserter(points),
CGAL::First_of_pair_property_map<Pwn>(),
CGAL::Second_of_pair_property_map<Pwn>()))
{
std::cerr << "Error: cannot read file data/oni.xyz" << std::endl;
return EXIT_FAILURE;
}
// Saves point set.
// Note: write_xyz_points_and_normals() requires an output iterator
// over points as well as property maps to access each
// point position and normal.
std::ofstream out("oni_copy.xyz");
if (!out ||
!CGAL::write_xyz_points_and_normals(
out, points.begin(), points.end(),
CGAL::First_of_pair_property_map<Pwn>(),
CGAL::Second_of_pair_property_map<Pwn>()))
{
return EXIT_FAILURE;
}
return EXIT_SUCCESS;
}
56.3 Analysis
Function CGAL::compute_average_spacing() computes the average spacing of all input points to their k nearest neighbor points, k being specified by the user. As it provides an order of a point set density, this function is used downstream the surface reconstruction pipeline to automatically determine some parameters such as output mesh sizing for surface reconstruction.Example
The following example reads a point set in the xyz format and computes the average spacing. Index, position and color are stored in a tuple and accessed through property maps.
File: examples/Point_set_processing_3/average_spacing_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/compute_average_spacing.h>
#include <CGAL/IO/read_xyz_points.h>
#include <vector>
#include <fstream>
#include <boost/tuple/tuple.hpp>
// Types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::FT FT;
typedef Kernel::Point_3 Point;
// Data type := index, followed by the point, followed by three integers that
// define the Red Green Blue color of the point.
typedef boost::tuple<int, Point, int, int, int> IndexedPointWithColorTuple;
int main(void)
{
// Reads a .xyz point set file in points.
// As the point is the second element of the tuple (that is with index 1)
// we use a property map that accesses the 1st element of the tuple.
std::vector<IndexedPointWithColorTuple> points;
std::ifstream stream("data/sphere_20k.xyz");
if (!stream ||
!CGAL::read_xyz_points(
stream, std::back_inserter(points),
CGAL::Nth_of_tuple_property_map<1,IndexedPointWithColorTuple>()))
{
std::cerr << "Error: cannot read file data/sphere_20k.xyz" << std::endl;
return EXIT_FAILURE;
}
// Initialize index and RGB color fields in tuple.
// As the index and RGB color are respectively the first and third-fifth elements
// of the tuple we use a get function from the property map that accesses the 0
// and 2-4th elements of the tuple.
for(unsigned int i = 0; i < points.size(); i++)
{
points[i].get<0>() = i; // set index value of tuple to i
points[i].get<2>() = 0; // set RGB color to black
points[i].get<3>() = 0;
points[i].get<4>() = 0;
}
// Computes average spacing.
const unsigned int nb_neighbors = 6; // 1 ring
FT average_spacing = CGAL::compute_average_spacing(
points.begin(), points.end(),
CGAL::Nth_of_tuple_property_map<1,IndexedPointWithColorTuple>(),
nb_neighbors);
std::cout << "Average spacing: " << average_spacing << std::endl;
return EXIT_SUCCESS;
}
Note that other functions such as centroid or bounding volumes are found in other Cgal components:CGAL::centroid
CGAL::bounding_box
Min_sphere_of_spheres_d<Traits>
56.4 Outlier Removal
Function CGAL::remove_outliers() deletes a user-specified fraction of outliers from an input point set. More specifically, it sorts the input points in increasing order of average squared distances to their k nearest neighbors and deletes the points with largest value.Example
The following example reads a point set and removes 5% of the points. It uses the CGAL::Dereference_property_map<Point_3> property map (optional as it is the default position property map of all functions in this component.)
File: examples/Point_set_processing_3/remove_outliers_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/property_map.h>
#include <CGAL/remove_outliers.h>
#include <CGAL/IO/read_xyz_points.h>
#include <vector>
#include <fstream>
// types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::Point_3 Point;
int main(void)
{
// Reads a .xyz point set file in points[].
// The Dereference_property_map property map can be omitted here as it is the default value.
std::vector<Point> points;
std::ifstream stream("data/oni.xyz");
if (!stream ||
!CGAL::read_xyz_points(stream, std::back_inserter(points),
CGAL::Dereference_property_map<Point>()))
{
std::cerr << "Error: cannot read file data/oni.xyz" << std::endl;
return EXIT_FAILURE;
}
// Removes outliers using erase-remove idiom.
// The Dereference_property_map property map can be omitted here as it is the default value.
const double removed_percentage = 5.0; // percentage of points to remove
const int nb_neighbors = 24; // considers 24 nearest neighbor points
points.erase(CGAL::remove_outliers(points.begin(), points.end(),
CGAL::Dereference_property_map<Point>(),
nb_neighbors, removed_percentage),
points.end());
// Optional: after erase(), use Scott Meyer's "swap trick" to trim excess capacity
std::vector<Point>(points).swap(points);
return EXIT_SUCCESS;
}
56.5 Simplification
Two simplification functions are devised to reduce an input point set, either randomly or using a grid-based clustering approach. Function CGAL::random_simplify_point_set() randomly deletes a user-specified fraction of points from the input point set. This algorithm is fast. Function CGAL::grid_simplify_point_set() considers a regular grid covering the bounding box of the input point set, and clusters all points sharing the same cell of the grid by picking as representant one arbitrarily chosen point. This algorithm is slower than CGAL::random_simplify_point_set().Example
The following example reads a point set and simplifies it by clustering.
File: examples/Point_set_processing_3/grid_simplification_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/grid_simplify_point_set.h>
#include <CGAL/IO/read_xyz_points.h>
#include <vector>
#include <fstream>
// types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::Point_3 Point;
int main(void)
{
// Reads a .xyz point set file in points[].
std::vector<Point> points;
std::ifstream stream("data/oni.xyz");
if (!stream ||
!CGAL::read_xyz_points(stream, std::back_inserter(points)))
{
std::cerr << "Error: cannot read file data/oni.xyz" << std::endl;
return EXIT_FAILURE;
}
// simplification by clustering using erase-remove idiom
double cell_size = 0.001;
points.erase(CGAL::grid_simplify_point_set(points.begin(), points.end(), cell_size),
points.end());
// Optional: after erase(), use Scott Meyer's "swap trick" to trim excess capacity
std::vector<Point>(points).swap(points);
return EXIT_SUCCESS;
}
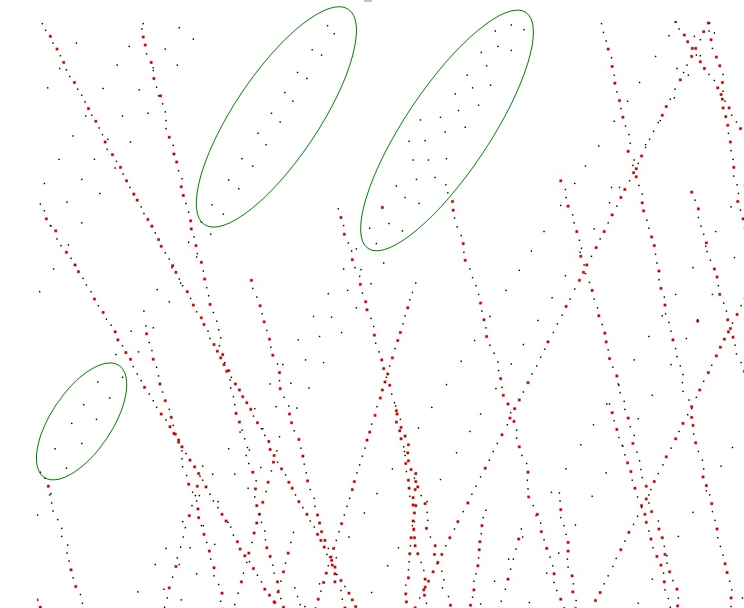
Figure 56.3: Point set simplification through grid-based clustering. Removed points are depicted in red. Notice how low-density areas (in green) are not simplified.
56.6 Smoothing
Function CGAL::jet_smooth_point_set smooths the input point set by projecting each point onto a smooth parametric surface patch (so-called jet surface) fitted over its k nearest neighbors.Example
The following example generates a set of 9 points close to the xy plane and smooths them using 8 nearest neighbors:
File: examples/Point_set_processing_3/jet_smoothing_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/jet_smooth_point_set.h>
#include <vector>
// types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::Point_3 Point;
int main(void)
{
// generate point set
std::vector<Point> points;
points.push_back(Point( 0.0, 0.0, 0.001));
points.push_back(Point(-0.1,-0.1, 0.002));
points.push_back(Point(-0.1,-0.2, 0.001));
points.push_back(Point(-0.1, 0.1, 0.002));
points.push_back(Point( 0.1,-0.1, 0.000));
points.push_back(Point( 0.1, 0.2, 0.001));
points.push_back(Point( 0.2, 0.0, 0.002));
points.push_back(Point( 0.2, 0.1, 0.000));
points.push_back(Point( 0.0,-0.1, 0.001));
// Smoothing.
const unsigned int nb_neighbors = 8; // default is 24 for real-life point sets
CGAL::jet_smooth_point_set(points.begin(), points.end(), nb_neighbors);
return EXIT_SUCCESS;
}
56.7 Normal Estimation
Assuming a point set sampled over an inferred surface S, two functions provide an estimate of the normal to S at each point. The result is an unoriented normal vector for each input point.
Function CGAL::jet_estimate_normals() estimates the normal direction at each point from the input set by fitting a jet surface over its k nearest neighbors. The default jet is a quadric surface. This algorithm is well suited to point sets scattered over curved surfaces.
Function CGAL::pca_estimate_normals() estimates the normal direction at each point from the set by linear least squares fitting of a plane over its k nearest neighbors. This algorithm is simpler and faster than CGAL::jet_estimate_normals().
56.8 Normal Orientation
Function CGAL::mst_orient_normals() orients the normals of a set of points with unoriented normals using the method described by Hoppe et al. in Surface reconstruction from unorganized points [HDD+92]. More specifically, this method constructs a Riemannian graph over the input points (the graph of the K nearest neighbor points) and propagates a seed normal orientation within a minimum spanning tree computed over this graph. The result is an oriented normal vector for each input unoriented normal, except for the normals which could not be successfully oriented.
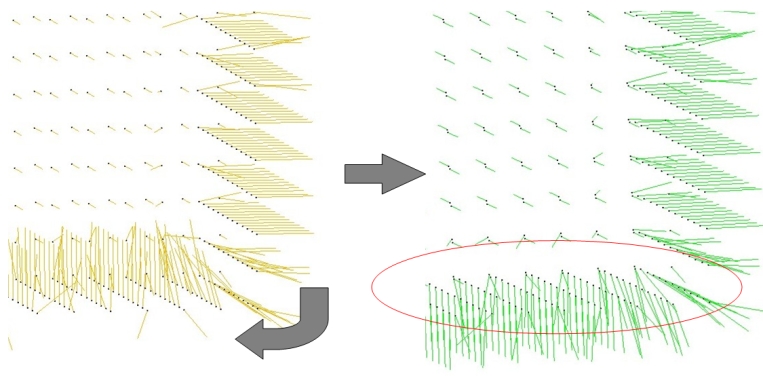
Figure 56.4: Normal orientation of a sampled cube surface. Left: unoriented normals. Right: orientation of right face normals is propagated to bottom face.
Example
The following example reads a point set from a file, estimates the normals through PCA over the 6 nearest neighbors and orients the normals:
File: examples/Point_set_processing_3/normals_example.cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/pca_estimate_normals.h>
#include <CGAL/mst_orient_normals.h>
#include <CGAL/property_map.h>
#include <CGAL/IO/read_xyz_points.h>
#include <utility> // defines std::pair
#include <list>
#include <fstream>
// Types
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::Point_3 Point;
typedef Kernel::Vector_3 Vector;
// Point with normal vector stored in a std::pair.
typedef std::pair<Point, Vector> PointVectorPair;
int main(void)
{
// Reads a .xyz point set file in points[].
std::list<PointVectorPair> points;
std::ifstream stream("data/sphere_20k.xyz");
if (!stream ||
!CGAL::read_xyz_points(stream,
std::back_inserter(points),
CGAL::First_of_pair_property_map<PointVectorPair>()))
{
std::cerr << "Error: cannot read file data/sphere_20k.xyz" << std::endl;
return EXIT_FAILURE;
}
// Estimates normals direction.
// Note: pca_estimate_normals() requires an iterator over points
// as well as property maps to access each point's position and normal.
const int nb_neighbors = 18; // K-nearest neighbors = 3 rings
CGAL::pca_estimate_normals(points.begin(), points.end(),
CGAL::First_of_pair_property_map<PointVectorPair>(),
CGAL::Second_of_pair_property_map<PointVectorPair>(),
nb_neighbors);
// Orients normals.
// Note: mst_orient_normals() requires an iterator over points
// as well as property maps to access each point's position and normal.
std::list<PointVectorPair>::iterator unoriented_points_begin =
CGAL::mst_orient_normals(points.begin(), points.end(),
CGAL::First_of_pair_property_map<PointVectorPair>(),
CGAL::Second_of_pair_property_map<PointVectorPair>(),
nb_neighbors);
// Optional: delete points with an unoriented normal
// if you plan to call a reconstruction algorithm that expects oriented normals.
points.erase(unoriented_points_begin, points.end());
// Optional: after erase(), use Scott Meyer's "swap trick" to trim excess capacity
std::list<PointVectorPair>(points).swap(points);
return EXIT_SUCCESS;
}