
|
CGAL 6.2 - 2D Intersection of Curves
|
Loading...
Searching...
No Matches
|
CGAL 6.2 - 2D Intersection of Curves
|
Let \( {\mathcal C} = \{C_1, C_2, \ldots, C_n\}\) be a set of curves. We wish to compute all intersection points between two curves in the set in an output-sensitive manner, without having to go over all \(O(n^2)\) curve pairs. To this end, we sweep an imaginary line \( l\) from \( x = -\infty\) to \( x = \infty\) over the plane. While sweeping the plane, we keep track of the order of curves intersecting it. This order changes at a finite number of event points, such that we only have to calculate the intersection points between two curves when they become contiguous. For more details on the surface-sweep algorithm see, for example, [1], Chapter 2.
This chapter describes three functions implemented using the surface-sweep algorithm: given a collection of input curves, compute all intersection points, compute the set of subcurves that are pairwise interior-disjoint induced by them, and checking whether there is at least one pair of curves among them that intersect in their interior.
The implementation is robust. It supports general curves and handles all degenerate cases, including overlapping curves, vertical segments, and tangency between curves. The robustness of the algorithm is guaranteed if the functions are instantiated with a traits class that employs certified computations. This traits class must be a model of the AosTraits_2 concept - see the Chapter 2D Arrangements for more details.
The complexity of the surface-sweep algorithm is \(O((n + k)\log{n})\) where \( n\) is the number of the input curves and \( k\) is the number of intersection points induced by these curves.
The simple program listed below computes intersection points induced by a set of four input segments illustrated in Figure 37.1.
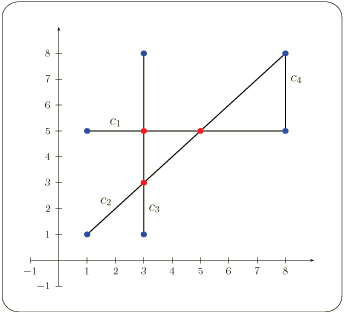
Figure 37.1 Four input segments
Example: Surface_sweep_2/plane_sweep.cpp
The current version of the surface-sweep algorithm was written by Efi Fogel, based on previous implementations by Baruch Ester Ezra, Tali Zvi, and Baruch Zukerman.